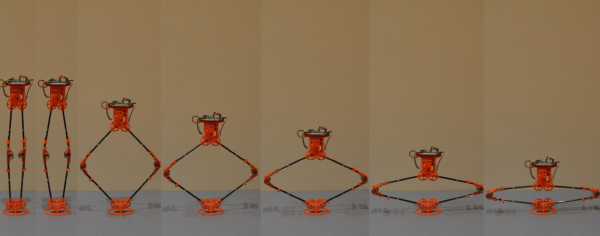
▲맨체스터대 연구팀이 설계한 점핑 로봇
영국 맨체스터대 연구팀이 120m를 점프할 수 있는 로봇을 설계했다고 테크엑스플로어가 18일 보도했다.
연구팀은 수학, 컴퓨터 시뮬레이션, 실험실 실험 등을 활용해 자신의 크기보다 몇 배나 높은 장애물을 뛰어넘을 수 있도록 최적의 크기, 형태, 부품 배열을 갖춘 점핑 로봇을 설계했다고 밝혔다.
현재 가장 높이 뛰는 로봇은 33m까지 도달할 수 있는데, 이는 자신의 크기의 110배에 해당하는 점핑 능력을 갖춘 것이다.
맨체스터대 연구팀은 공중에서 120미터 이상(빅벤 타워 높이의 두 배 이상)을 뛸수 있는 점핑 로봇을 설계했다.
이번 연구 성과는 전문 저널인 ‘메커니즘과 기계 이론(Mechanism and Machine Theory)'에 발표됐다.(논문 제목:Characterising the take-off dynamics and energy efficiency in spring-driven jumping robots)
연구팀은 이번 기술 발전이 행성 탐사, 재난 구조, 위험하고 접근하기 힘든 공간에 대한 감시 활동 등 여러 응용 분야에서 혁명적인 변화를 가져올 것이라고 주장했다.
맨체스터대 우주 로봇 연구자이자 논문 공동 저자인 존 로(John Lo) 박사는 “로봇은 전통적으로 바퀴나 다리를 이용해 구르거나 걸을 수 있도록 설계되었지만, 점프는 지형이 고르지 않거나 동굴 내부, 숲, 바위, 심지어 우주의 다른 행성처럼 장애물이 많은 장소를 이동하는 효과적인 방법을 제공한다”며, “이미 점핑 로봇이 많이 존재하지만, 우리의 설계방식은 스프링 구동 점핑 로봇의 에너지 효율과 성능을 극적으로 향상시킨다"고 말했다.
연구팀은 전통적인 점핑 로봇들이 스프링 에너지를 완전히 방출하기 전에 이륙함으로써 비효율적으로 점핑을 하고 최대 높이를 제한한다는 점을 확인했다. 또한 로봇이 똑바로 올라가는 대신 좌우로 움직이거나 회전함으로써 에너지를 낭비한다는 것도 발견했다.
연구팀이 고안한 새로운 설계방식은 필요한 구조적 강도와 강성을 유지하면서 바람직하지 않은 동작을 제거하는 데 중점을 뒀다.
공동 저자인 벤 파슬류(Ben Parslew) 박사는 "캥거루처럼 땅을 밀어낼 수 있는 다리를 가져야 하는지, 아니면 거대한 스프링이 있는 엔지니어링 피스톤에 더 가까워야 하는지? 로봇의 형태에 대해 결정해야할 것들이 너무 많았다. 또한 다이아몬드처럼 단순한 대칭 형태여야하는지? 아니면 더 구부러지고 유기적인 형태여야 하는지? 질문이 꼬리를 물었다”고 말했다.
작은 로봇은 가볍고 민첩하지만, 큰 로봇은 더 강력한 점프를 위해 더 큰 모터를 운반할 수 있다. 그렇다면 중간 어딘가에 최선의 선택이 있는 것인가? 연구팀이 고민한 부분들이다.
연구팀은 "우리의 구조적 재설계는 로봇 구성요소의 질량을 위쪽으로 재분배하고, 아래쪽으로는 점점 줄어들게 하는 것이다. 프리즘 모양의 가벼운 다리와 신축성 있는 스프링을 사용한 것은 점핑 로봇의 성능과 에너지 효율을 향상시키는 것으로 나타났다“고 말했다.
연구팀은 앞으로 점프의 방향을 제어하고, 한번 충전으로 로봇이 할 수 있는 점프의 수를 향상시키고, 착륙시 나오는 운동 에너지를 활용하는 방법을 찾을 것이라고 밝혔다. 또한 우주 임무를 수행하기위해 더 컴팩트한 로봇 설계를 통해 로봇을 달에 운반하고 배치하기 더 쉽도록 만든다는 계획이다.
장길수 ksjang@irobotnews.com
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'전문서비스로봇' 카테고리의 다른 글
| 뉴빌리티, 요기요와 ‘도심 로봇배달 서비스’ 나선다 (0) | 2024.06.21 |
|---|---|
| 日 하쿠오우 로보틱스, '자율지게차-화물 엘리베이터' 연동 실증 실험 (0) | 2024.06.21 |
| 中 여우이봇, "웨이퍼 운반 로봇, 반도체 공장 자동화 해결책" (0) | 2024.06.20 |
| 현대자동차그룹, 성수동 오피스 건물서 로봇 서비스 개시 (0) | 2024.06.20 |
| 獨 ARX 로보틱스, 모듈식 무인지상차량으로 133억원 유치 (0) | 2024.06.20 |