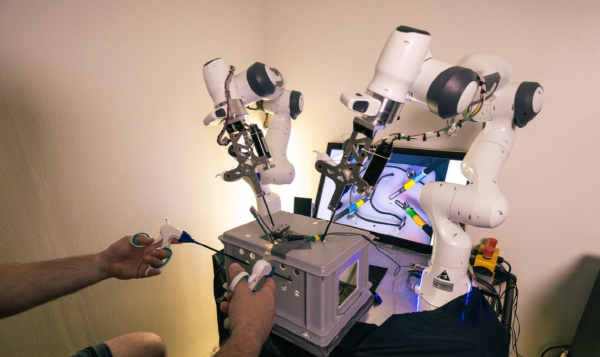
▲ EPFL연구팀이 개발한 햅틱 풋 인터페이스 지원 수술 로봇 기술
스위스 로잔연방공과대(EPFL) 연구팀이 발의 촉각을 이용해 수술용 로봇팔을 제어할 수 있는 새로운 인터페이스 기술을 개발했다고 7일(현지 시각) 밝혔다.
일반적으로 복강경 수술 로봇은 외과 의사가 손 동작으로 2개의 로봇 팔을 조작할 수 있는데, 여기에 햅틱 풋 인터페이스(haptic foot interface)를 활용해 2개의 로봇팔을 추가적으로 제어할 수 있다. 총 4개의 팔을 이용해 복강경 수술을 진행할 수 있는 것이다.
외과 의사들은 2개의 자연스러운 팔과 함께 5자유도의 햅틱 풋 인터페이스를 활용해 2개의 추가 로봇팔을 제어한다. 한 발로 내시경/카메라를, 다른 발로 그립퍼를 제어하면서, 각 손은 따로 조작기기를 제어할 수 있다.
연구팀은 “이 기술의 혁신성은 외과의사와 로봇 보조원 간의 공유 제어에 있다”며, “우리가 개발한 제어 프레임워크는 복강경 수술의 정밀도와 안전성 요구를 충족시키면서, 동시에 작업 공간 내에서 외과의사와 로봇이 협력적으로 작업할 수 있도록 보장한다”고 말했다.
이번 연구 성과는 전문 학술지인 ’The International Journal of Robotics Research‘에 게재됐으며, 연구팀은 제네바에서 임상 시험을 진행하고 있다고 밝혔다.
이번 연구를 수행한 모하메드 부리는 “발 페달의 액추에이터는 눈에 보이지 않는 힘을 따르는 것처럼, 발을 목표물 쪽으로 안내하면서 사용자에게 촉각적인 피드백을 제공한다. 또한 잘못된 발 동작이 환자를 위험에 빠뜨리지 않도록 하기 위해 힘과 움직임을 제한한다”고 말했다. 또한 “우리 시스템은 외과 의사들이 4개의 손으로 복강경 수술을 수행할 수 있는 새로운 가능성을 열어준다”고 지적했다.
4개의 팔을 동시에 제어하는 것은 복잡하고 자칫 피곤함을 유발할 수 있다. 이와 관련해 EPFL 연구팀은 로봇 제어의 복잡성을 줄이기 위해 로봇은 의사의 의도를 능동적으로 예측하며, 카메라로 복강경 기구를 시각적으로 추적하고 의사의 움직임을 조정함으로써 의사를 적극 지원한다고 말했다.
장길수 ksjang@irobotnews.com
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'전문서비스로봇' 카테고리의 다른 글
| 美 앰비 로보틱스, 초고속 소포 분류 로봇 발표 (1) | 2023.07.13 |
|---|---|
| 스페인 키브논, 5천번째 모바일 로봇 설치...새로운 이정표 세워 (0) | 2023.07.13 |
| 일본 RT코퍼레이션, 연구용 휴머노이드 '고릴라' 출시 (0) | 2023.07.12 |
| 佛 비:봇, 285억원 투자 유치···올연말 플라스틱 재활용 로봇 1000대로 (0) | 2023.07.12 |
| 美 아이젠, 태양광만 사용하는 AI 제초로봇 서비스 (0) | 2023.07.11 |