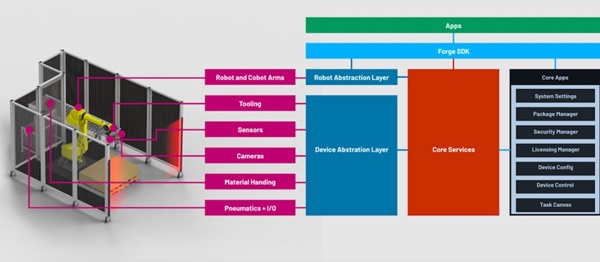
美 레디 로보틱스(Ready Robotics)가 범용 운영체제(OS)인 포지/OS5(Forge/OS 5)를 지난 13일(현지 시각) 출시했다고 ‘더로봇리포트’가 보도했다. 로봇 산업은 꾸준히 발전해 왔지만 프로그래밍 복잡성과 공통 표준 및 플랫폼의 부족은 여전히 업계의 주요 장애물로 남아있다. 빌 게이츠는 이미 지난 2008년 이같은 문제점을 언급했다. 그러나 오하이오주 콜럼버스에 있는 레디로보틱스 본사의 로봇 전시장은 이와 다르다. 하나의 범용 제어시스템에서 명령을 받는 다양한 로봇들이 전시돼 있다. 이 회사가 더 이상 로봇의 파편화가 이뤄지지 않도록 노력해 온 것은 지난 2016년부터다. 레디로보틱스는 지난 13일(현지 시각) 포지/OS5 출시로 이 여정에서 한 걸음 더 나아갔다. 이 회사의 이 오픈소스 운영체제(OS)는 모든 주요 브랜드 로봇을 제어한다. 벤자민 깁스 레디로보틱스 공동 설립자이자 최고경영자(CEO)는 마치 윈도OS가 PC에, 안드로이드가 스마트폰에 한 것처럼 포지/OS가 똑같은 일을 로봇에 해 주기를 바란다. 그는 “이것이 수십만 대 로봇에서 수백만 대 판매된 로봇으로 다가가는 방법”이라고 말했다. 포지/OS 5는 이미 250대 이상의 로봇과 호환된다. 여기에는 협동로봇(코봇)과 전통적 산업용 로봇이 포함되며, 곧 스카라 로봇도 지원될 예정이다. 이 OS는 또한 카메라, 힘 센서, 그리퍼 등을 포함해 점점 더 많은 액세서리 목록을 지원한다. 포지/OS 5는 리눅스, C++ 및 Qt 5.15 기반으로 만들어졌다. 로봇과 주변기기 브랜드를 여러 개 사용하는 고객의 복잡성을 줄이는 것이 주요 목표 중 하나다. 이를 위해 포지/OS 5는 브랜드 별 로봇 프로그래밍 언어를 태스크 캔버스(Task Canvas)라는 코드 없는 프로그래밍 앱으로 요약했다. 이 시스템은 당면한 애플리케이션에 따라 흐름도로 구성된 코드 블록들을 사용한다. 레디 로보틱스는 사용자가 태스크 캔버스를 배우기 위해 로봇공학 박사학위를 필요로 하지 않다고 말했다. 각 프로그래밍 블록에는 작업 유형에 따라 사용자가 지정할 수 있는 매개 변수가 있다. 사용자는 이러한 변수를 바꿔 포지/OS에 연결된 로봇, 그리고 그 어떤 장치나 주변장치라도 제어할 수 있다. 이 OS는 오픈 소스이므로 써드 파티 개발자도 필요한 경우 자체 앱이나 태스크 캔버스 블록을 구축할 수 있다. 레디 로보틱스는 현재 약 50개 회사와 제휴했고 더많은 업체가 가세할 것으로 예상하고 있다.
조쉬 시블룸 엔지니어링 부사장은 포지/OS 5가 써드파티 개발을 손쉽게 하기 위해 만들어졌다고 말했다. 포지 SDK 베타는 6월에 제공될 예정이다. 레디 로보틱스는 유니티의 게임 엔진을 탑재한 포지/OS 5에 로봇 시뮬레이터를 만들었다. 이를 사용하면 물리 기반 환경에서 다양한 로봇을 프로그래밍할 수 있다. 켈 궤린 레디로보틱스 공동 창업자겸 최고정보책임자(CIO)는 이날 픽앤플레이스 및 머신텐딩 시뮬레이션을 시연했다. 그는 “시뮬레이터가 실제 포지OS 인터페이스를 사용해 시뮬레이션된 로봇을 프로그래밍하기 때문에 가상 환경에서 학습된 모든 것을 물리적 시스템으로 작업하면 곧바로 실제 생산 작업 셀로 변환될 것”이라고 말했다. 후안 아파리시오 레디 로보틱스 제품담당 부사장은 “지금까지 개발자들이 자동화의 폭발적인 확산에 불을 붙이는 힘을 가진 앱을 만들 수 있는 좋은 채널이 없었다”며 “자동화를 위한 진정한 개발자 생태계를 구축하면 새로운 자동화 시대를 맞이할 수 있다”고 말했다. 아파리시오는 지멘스에서 10년 이상 근무하다 올해 3월 입사해 첨단 제조 자동화 팀을 이끌고 있다.  |
||||||||||||
| <저작권자 © 로봇신문사 무단전재 및 재배포금지> | ||||||||||||

'로봇부품·소프트웨어' 카테고리의 다른 글
| 매스웍스코리아, '매트랩 엑스포 2021' 온라인으로 개최 (0) | 2021.05.27 |
|---|---|
| 블루프리즘, 지능형 자동화 플랫폼 ‘블루프리즘 버전 7’ 출시 (0) | 2021.05.25 |
| 中 링스로봇, 시리즈A+ 투자 유치...'3D 비전' 기술 개발에 박차 (0) | 2021.05.12 |
| 래티스, 산업용 자동화 시스템 개발을 가속화하는 ‘오토메이트’ 솔루션 스택 발표 (0) | 2021.05.12 |
| RPA 전문기업 '오토메이션애니웨어', 구글 클라우드 기반 ‘오토메이션 360’ 제공 (0) | 2021.05.10 |