중국에서 인간과 로봇 간의 물리적 협업을 보다 효율적이고 안전하게 수행하기 위한 새로운 방법론이 제안돼 주목받고 있다.
중국 언론 커쉰톈샤에 따르면, 중국과학원 자동화연구소(CASIA)와 중커후이링로봇테크놀로지(Zhongke Huiling Robot Technology, 中科慧灵机器人)의 휴머노이드 로봇 브랜드 '링바오(CASBOT, 灵宝)'가 공동으로 ‘물리적 인간-로봇 협업에서 인간의 의도 추정과 역할 분담 향상(DTRT: Enhancing Human Intent Estimation and Role Allocation for Physical Human-Robot Collaboration)’이라는 방법론을 제안했다.
이 방법론은 최근 열린 국제 로봇 및 자동화 학회인 'ICRA 2025'에서 공식 채택됐다.
물리적 인간-로봇 협업(pHRC)에서는 정확한 인간 의도 추정과 효율적인 역할 분담이 협업의 안전성과 성능을 좌우한다. 하지만 기존에는 단기적인 동작 데이터를 기반으로 한 의도 추정 방식이 주를 이뤘고, 이로 인해 장기적인 의도 변화 파악이나 자율적인 역할 할당에는 한계가 있었다. 이는 결국 인간과 로봇 간 의사 불일치로 이어질 수 있었다.
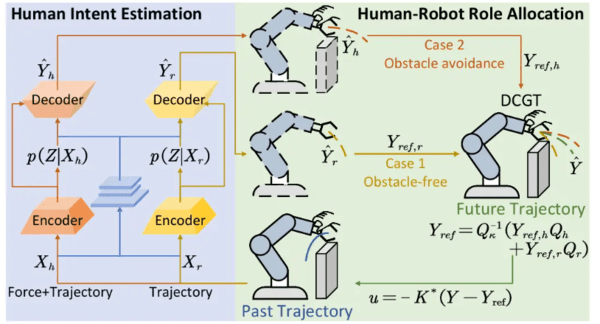
▲인간의 의도 추정 및 역할 분담을 위한 이중 트랜스포머 기반 로봇 궤적 예측기
이러한 한계를 극복하기 위해 제안된 이중 트랜스포머 기반 로봇 트라젝트론(Dual Transformer-based Robot TrajectronㆍDTRT)’ 구조는 인간이 가하는 운동 및 힘 데이터를 실시간으로 분석해 의도 변화를 감지하고, 로봇의 궤적을 정밀하게 예측하며 협업 행동을 동적으로 조절할 수 있게 한다.
DTRT는 구체적으로 두 개의 트랜스포머 기반 조건부 변분 오토인코더(CVAE)를 사용하여, 장애물이 없는 상황에서의 로봇 동작 데이터와 장애물 회피 상황에서 인간이 만들어내는 궤적 및 힘 데이터를 통합한다. 또한 차등 협력 게임 이론(DCGTㆍDifferential Cooperative Game Theory)을 활용해 이 데이터를 기반으로 로봇의 행동이 인간의 의도와 얼마나 일치하는지를 판단한다.
이 방식은 기존보다 훨씬 더 정교한 의도 추정과 합리적인 역할 분담을 가능하게 하며, 동시에 로봇의 자율성과 인간과의 조작 효율성을 높인다. 궁극적으로는 로봇이 인간의 의도에 부합하는 방식으로 작동하면서도 자율적인 판단을 유지할 수 있도록 돕는다.
한편, 이번 연구에 참여한 링바오 카스봇은 중커후이링로봇테크놀로지가 보유한 인공지능 및 로봇 기술을 바탕으로 한 브랜드다. 지난해 11월에는 풀사이즈 2족 보행 휴머노이드 로봇인 ‘카스봇(CASBOT) 01’을 발표했다. 이 로봇은 전신에 52개의 자유도를 탑재하고 있으며, 550T의 컴퓨팅 성능과 최대 4시간 연속 작동이 가능한 기술력을 자랑한다.
저작권자 © 로봇신문 무단전재 및 재배포 금지
'인공지능' 카테고리의 다른 글
| '에이플', 시드 투자 성공적 유치...조선소 AI 자율제조 솔루션 시장 공략 (2) | 2025.05.27 |
|---|---|
| 펀진, 리게티·노르마와 양자컴퓨팅 기반 국방 AI 기술 개발 위한 MOU 체결 (1) | 2025.05.26 |
| UAE '무함마드 빈 자이드 인공지능대', 파운데이션 모델 연구소 출범 (0) | 2025.05.26 |
| KAIST, 질병 판단·신약 발굴위해 ‘한국형 챗GPT 플랫폼’ 개발한다 (5) | 2025.05.23 |
| 태국어 LLM부터 관광 특화 AI까지… 네이버클라우드, 동남아 소버린 AI 시장 확대 시동 (1) | 2025.05.23 |