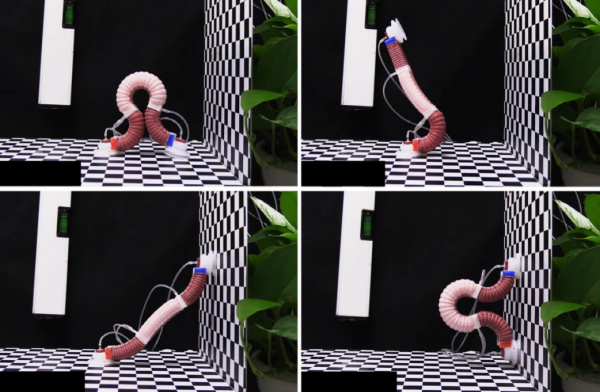
▲ 상하이자오퉁대 연구진이 수평면과 수직면을 이동할 수 있는 소프트 로봇을 개발했다.(사진=상하이자오퉁대학)
중국 상하이자오퉁대(上海交通大学) 연구진이 자벌레에서 영감을 얻어 수평면과 수직면을 동시에 이동할 수 있는 소프트 로봇을 개발했다고 'IEEE 스펙트럼'이 지난 17일(현지 시각) 보도했다. 로봇 자벌레는 수평면을 이동하다가 수직 벽을 만나더라도 거침없이 벽면을 타고 오를 수 있다.
로봇과학자들은 그동안 자연계의 동물로부터 영감을 얻어 자신의 몸을 수축하고 팽창하는 방식으로 전진할 수 있는 소프트 로봇을 개발해 왔다. 하지만 이들 소프트 로봇은 수평면을 이동하다 수직면을 만나면 더 이상 이동하는 게 힘들다.
상하이자오퉁대학 기계공학부문 로봇연구소 '궈잉 구(Guoying Gu)' 교수는 수평면과 수직면을 동시에 이동할 수 있는 소프트 로봇을 개발하고, 연구 논문을 ‘IEEE 트랜젝션스 온 로보틱스’에 발표했다.
소프트 로봇이 수평면에서 수직면으로 이동하기위해선 강성과 유연성을 동시에 갖추고 있어야 한다.
연구팀은 3개의 섬유강화 공기압 액추에이터를 갖춘 소프트 로봇을 개발했다. 이 공기압 액추에이터는 꼬리, 머리, 몸체 등 로봇의 각 부분에 대한 정밀한 제어능력을 갖고 있다. 로봇의 제어시스템은 액추에이터의 위치를 모니터링하면서 로봇 전체에 대한 동작을 조절할 수 있다.
이 소프트 로봇은 2개의 실리콘층으로 구성되어 있는 2개의 압력 흡착장치를 갖추고 있다. 실리콘층 사이에 있는 공기가 빠져나가면 흡착장치는 딱딱해지면서 높은 외부의 힘과 토크를 다룰 수 있는 상태로 바뀐다. 또한 공기압 액추에이터와 흡착장치는 로봇 자벌레에 추진력을 줄 수 있도록 동시적으로 작동한다. 실제 자벌레처럼 로봇 자벌레는 몸을 수축 또는 팽창하면서 전진하고 수직벽을 오른다.
수평면 이동시 초당 21mm, 수직면 이동시 초당 15mm의 속도로 움직인다. 로봇은 수평면에서 자신의 몸무게의 15배에 달하는 500g의 짐을 실고 이동할 수 있으며 수직면에선 20g까지 실을 수 있다.
궈잉 구 교수는 “소프트 로봇이 수평면과 수직면을 이동하는 기술을 구현한 것은 이번이 처음”이라며 소프트 로봇의 작업 공간을 확장하는 데 기여할 것이라고 했다.
연구팀은 이번 소프트 로봇 기술을 검사, 청소, 유지보수, 감시 등 영역에 적용할 수 있을 것으로 기대하고 있다. 앞으로 이 기술을 공기압 뿐 아니라 유압식에도 적용할 수 있을 것으로 보고 있다. 연구팀은 향후 보다 많은 센서를 적용해 로봇의 제어를 자동화하고, 보다 비구조화된 지형과 환경에 맞는 소프트 로봇 기술을 개발한다는 계획이다.
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'전문서비스로봇' 카테고리의 다른 글
| 이스라엘 파워매트, 300억 유치···로봇용 무선충전 기술 확장 나서 (0) | 2021.12.21 |
|---|---|
| 美 AMR 전문기업 시그리드, 어플라이드 인튜이션과 제휴 (0) | 2021.12.21 |
| 스위스 EPFL, BMI 기반 로봇 조작 기술 개발 (0) | 2021.12.20 |
| MIT, 인공근육 기반 마이크로 비행 로봇 개발 (0) | 2021.12.20 |
| 中 선전 국제공항, cm급 고정밀 위치 인식 서비스 로봇 운영 (0) | 2021.12.20 |