▲ 인공근육 기반 마이크로 비행 로봇(사진=MIT)
MIT 연구진이 인공근육 기술에 기반한 마이크로 비행 로봇을 개발했다고 17일(현지 시각) 밝혔다.
케빈 첸 등 MIT 연구진은 ‘유전체 탄성중합체 액추에이터(DEA·dielectric elastomer actuators)' 기술을 활용해 무게 0.16g에 불과한 ’근육을 닮은‘ 소프트 액추에이터를 개발하고, 연구 성과를 전문 저널인 ’어드밴스드 머티리얼스(Advanced Materials)‘ 최신판에 게재했다고 밝혔다.
이번에 개발된 마이크로 비행 로봇은 과거에 이뤄졌던 여러 DEA 기반 마이크로 시스템의 성능을 능가한다는 평가를 받는다. 이 로봇은 낮은 전압에도 작동하며, 작은 크기에도 불구하고 높은 내구성을 지니고 있다.
케빈 첸은 “우리는 꽃가루 수정, 집단적인 수색 활동 업무를 수행할 수 있는 곤충과 같은 군집 로봇을 만들겠다는 장기적인 비전을 갖고 있다”면서 “3년 전부터 우리는 근육을 닮은 소프트 액추에이터로 구동되는 비행 로봇을 개발해왔다”고 말했다.
이전 연구에서 연구진은 공중에서 곡예동작을 수행하고, 다른 물체와 충돌 후에도 빠르게 기능을 회복할 수 있는 여러 마이크로 로봇을 선보였다. 이 같은 유망한 성과에도 불구하고, 소프트 액추에이터는 2kV의 높은 구동 전압을 필요로 했고, 외부 전력공급장치 없이 작동할 수 없다는 한계를 보였다.
케빈 첸은 “소프트 액추에이터가 전선없이 비행하기 위해선 소프트 액추에이터가 더 낮은 전압에서 작동할 필요가 있다”고 말했다.

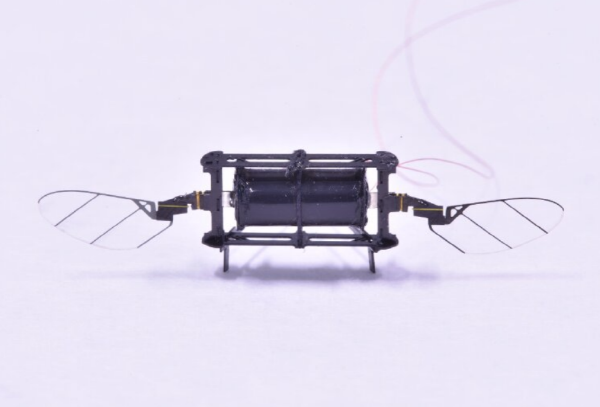
▲ 인공근육 기반 마이크로 비행 로봇. 향후 꽃가루 수정에 활용될 수 있을 것으로 기대를 모으고 있다. (사진=MIT)
이번에 개발된 소프트 액추에이터는 한쌍의 소프트 캐패시터(soft capacitors)처럼 작동한다. 전압이 가해지면 사람과 동물의 근육이 수축하는 방식과 유사하게 정전력이 발생해 액추에이터를 변형시킨다. 이 액추에이터는 초당 400회 진동하고, 이 동작이 양력을 발생시켜 로봇이 날 수 있도록 한다. 이 소프트 로봇은 강하고 민첩하며 비행 중 장애물과 충돌해도 기능을 회복할 수 있다. 0.16초 안에 360도 회전이 가능하다.
이전 성과에 비해 소프트 액추에이터는 500V의 낮은 전력으로 구동 가능하며, 양력도 80% 개선된 것으로 나타났다. 연구팀은 “앞으로 구동 전압을 500V에서 100V 아래로 낮추고, 소형 로봇을 위한 소형 회로와 배터리를 설계하겠다"며 "우리는 언젠가 로봇이 스스로 전력을 운반하고 전선 없이 비행할 수 있기를 바라고 있다"고 밝혔다.
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'전문서비스로봇' 카테고리의 다른 글
| 중국 상하이자오퉁대, 수직벽을 오르는 소프트 로봇 개발 (0) | 2021.12.20 |
|---|---|
| 스위스 EPFL, BMI 기반 로봇 조작 기술 개발 (0) | 2021.12.20 |
| 中 선전 국제공항, cm급 고정밀 위치 인식 서비스 로봇 운영 (0) | 2021.12.20 |
| 中 칭화대-푸두로보틱스, 선전에 '지능서비스 로봇 공동연구센터' 설립 (0) | 2021.12.20 |
| 獨 카처, 자율 진공청소 로봇 런칭 (0) | 2021.12.20 |