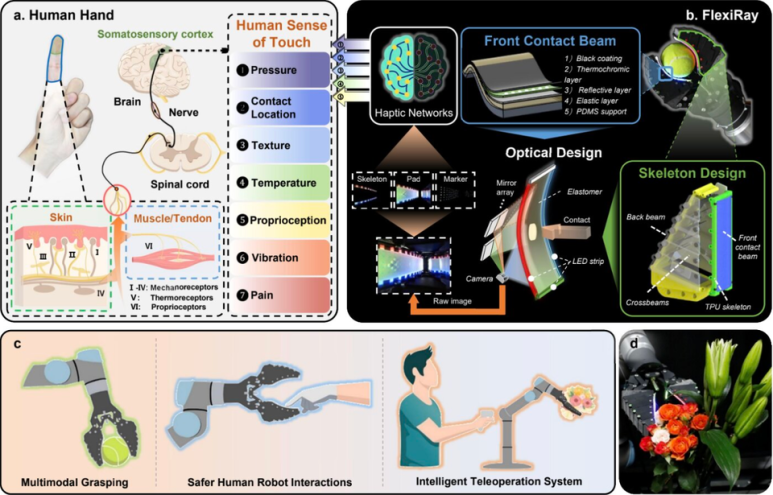
▲ 인간의 손과 플렉시레이의 구조 및 기능
중국 저장대 연구팀이 인간처럼 눈으로 직접 보지 않고도 손끝의 감각만으로 물체를 인지하고 정교하게 조작할 수 있는 기술을 개발했다.
17일 테크엑스플로어 보도에 따르면, 중국 저장대(Zhejiang University) 연구팀은 내장 카메라로 접촉한 물체의 표면을 ‘보면서’ 인지할 수 있는 획기적인 소프트 로봇 핸드인 ‘플렉시레이(FlexiRay)’를 개발했다.
이번 연구 성과는 전문 학술지인 네이처 커뮤니케이션즈(Nature Communications) 최신호에 게재됐다. (논문 제목:Flexible robotic hand harnesses large deformations for full-coverage human-like multimodal haptic perception)
연구팀에 따르면, 그동안 개발된 대부분의 로봇 핸드는 ‘시각-촉각’ 센서를 사용했다. 이 센서는 내장 카메라로 이미지를 촬영하면서 물체와의 접촉으로 발생하는 표면 변형을 시각적으로 포착한다. 하지만 이같은 센서들은 카메라가 고품질 이미지를 포착할 수 있도록 단단한 소재로 제작돼야 한다는 한계를 갖고 있었다. 소프트 로봇 손가락이 크게 구부러지면 카메라의 시야가 차단되어 접촉한 물체의 표면을 볼 수 없기 때문이다. 이로 인해 로봇의 전체적인 유연성을 저하시켜 깨지기 쉽거나 불규칙한 형태의 물체를 다루기 어려웠다.
저장대 연구팀은 이 문제를 극복하기위해 물고기 지느러미의 움직임에서 영감을 받아 ‘핀 레이 효과(Fin Ray Effect)’라는 생체모방 구조를 소프트 로봇핸드에 적용했다.
이번 연구를 주도한 동 후이쉬(Huixu Dong) 교수는 “일반적으로 소프트 로봇 손가락이 구부러지면 내장 카메라의 시야를 차단하게 된다”며 “플렉시레이는 독자적인 내부 광학 시스템을 통해 손가락의 수동 변형에 반응하여 카메라 시야를 동적으로 재조정할 수 있다”고 설명했다.
기존 센서들이 변형을 피하려 했던 것과 달리, 플렉시레이는 구조적 변형을 유효한 광학 신호로 변환할 수 있다. 손가락의 기계적 변형이 광학 시스템을 구동함으로서 플렉시레이는 불규칙한 물체를 감싸면서도 접촉 표면에 대한 연속적이고 방해받지 않는 시야를 유지할 수 있다는 설명이다.
플렉시레이의 ‘피부’는 열변색(온도에 따라 색이 변하는 것) 소재와 반사 소재를 포함한 다층 패드로 구성되어 있다. 이를 통해 내장 카메라는 물체에 가해진 힘, 물체의 형태, 물체와의 접촉 위치, 물체의 질감, 물체의 온도를 파악할 수 있다는 설명이다.
연구팀이 플렉시레이를 테스트한 결과 대규모 변형 상황에서도 90% 이상의 효과적인 감지 범위를 달성했다. 동 교수는 “일반적인 센서는 작고 평평한 부분만 감지하는 반면, 플렉시레이는 물체의 형태에 맞춰 변형되기 때문에 대규모 효과적인 감지 영역을 달성할 수 있다”고 말했다.
연구팀은 향후 플렉시레이를 그리퍼뿐 아니라 더욱 복잡한 물체 조작이 가능한 완전한 다지형 로봇 핸드로 확장할 계획이다. 동 교수는 “이 하드웨어를 모방 학습 프레임워크와 통합해 로봇이 플렉시레이가 제공하는 풍부한 시각 기반 촉각 및 열 데이터를 사용해 인간의 시연을 통해 직접 손재주와 안전성을 학습할 수 있을 것“이라고 밝혔다.
백승일 기자 robot3@irobotnews.com
저작권자 © 로봇신문 무단전재 및 재배포 금지
'로봇부품·디바이스·소프트웨어' 카테고리의 다른 글
| 소프트 로봇의 5가지 핵심 요소 (0) | 2026.01.20 |
|---|---|
| 印 그레이오렌지, 창고지능화 위해 예측 기능 AI 항법 내놓는다 (0) | 2026.01.20 |
| 글로벌 휴머노이드용 액추에이터 시장, 2031년까지 연평균 80% 성장…14조원 규모 전망 (0) | 2026.01.19 |
| 본시스템즈, 휴머노이드 로봇 손에 들어가는 초소형 액추에이터 개발 (0) | 2026.01.16 |
| 日 ‘XELA 로보틱스’, 3D 촉각센서 앞세워 글로벌 시장 공략 (0) | 2026.01.15 |