마트에서 식료품을 구입한 후 쇼핑백이나 상자에 물건을 담는 일은 꽤 신경 쓰이는 일이다. 달걀, 채소, 생선, 음료수병, 감자칩 등 구입한 물건들을 아무렇게나 상자에 담았다가 의도치 않게 달걀이 깨지거나 신선한 채소가 뭉개지는 사태가 벌어질 수 있다.
MIT뉴스에 따르면 MIT 컴퓨터과학 및 인공지능 연구소(CSAIL·Computer Science and Artificial Intelligence Laboratory)는 식료품을 상자에 효율적으로 담을 수 있는 소프트 로봇인 ‘로보그로서리’(RoboGrocery)를 개발했다.
MIT CSAIL 연구팀은 이번 연구 성과를 올해 4월 14일부터 17일까지 미국 샌디에이고에서 열린 ‘로보소프트(ROBOSOFT) 2024’에서 발표했다.(논문 제목:Real-Time Grocery Packing by Integrating Vision, Tactile Sensing, and Soft Fingers)
로보그로서리는 첨단 비전시스템, 모터 기반 독자 인식, 소프트 촉각센서, 새로운 알고리즘을 결합해 만들어졌다. 연구팀은 로보그로서리가 컨베이어 벨트를 따라 움직이는 물건의 연속적인 흐름을 처리할 수 있다고 말했다.
논문 주요 저자인 나난 장(Annan Zhang) 박사과정 학생은 “물건(식료품)이 컨베이어 벨트에서 흘러갈 때 물건에 대해 어떤 가정도 하지 않는다. 물건을 상자에 넣어야할지 말아야할지를 즉각 결정하는 것은 도전적인 과제”라면서 "로보그로서리는 각각의 물건을 측정하고, 그것이 민감한 제품인지 아닌지를 결정하고, 이어 직접 박스에 넣거나 나중에 넣기위해 별도 완충 공간(버퍼)에 놓아야 한다“고 말했다.
연구팀은 로봇이 이전에 경함한 적이 없는 10개 품목의 식료품을 무작위로 컨베이어벨트에 올린후 테스트를 수차례 진행했다. 상자에 식료품을 넣는 과정에서 무거운 물건 밑에 민감한 물건이 놓이면 ‘나쁜 물건 담기’라고 평가할 수 있다.
실험 결과 로보그로서리는, 감각적인 피드백 없이 미리 프로그래밍된 파지(grasping) 동작을 수행하는 시스템에 비해 9배 정도 물건에 손상을 덜 입히는 것으로 나타났다. 또한 물건을 식별하기 위해 카메라를 사용했지만 촉각 감지 능력이 부족한 시각 전용 접근 방식보다 4.5배 정도 적게 물건에 손상을 입혔다.

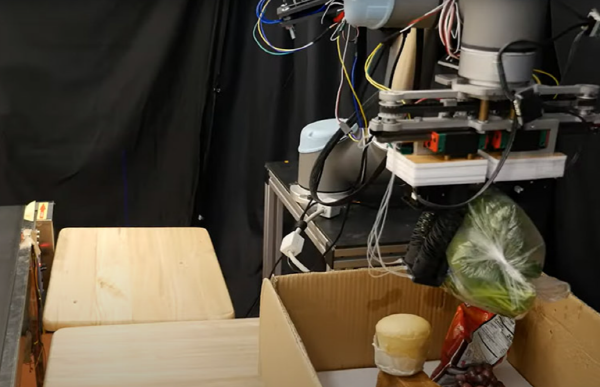
이 시스템은 포도 송이와 수프 한 캔이 컨베이어 벨트를 타고오면 먼저, RGB-D 카메라를 이용해 포도 송이와 수프 캔을 감지하고 크기와 위치를 추정한다. 그리퍼가 포도 송이를 집어들면, 부드러운 촉각 센서가 압력과 변형을 측정해 포도가 '민감한 물건'이라는 신호를 보낸다. 이어 알고리즘은이 민감함의 정도를 점수화해 완충공간(버퍼)에 놓는다. 그러나 수프 캔이 들어오면 센서는 민감함의 정도가 수준이 낮다는 의미의 ‘최소 변형’ 값을 측정하고, 낮은 점수의 민감도를 부여한다. 그러면 그리퍼가 바로 수프 캔을 상자에 직접 넣는다.
민감도 점수가 낮은 모든 물품을 박스에 넣은 후에 로보그로서리는 포도를 완충공간에서 집어 상자 윗부분에 조심스럽게 내려놓는다. 이 과정에서 마이크로프로세서는 모든 감각 데이터를 처리하고 식료품 담기 동작의 실행을 실시간으로 결정한다.
연구팀은 빵, 포도, 케일, 머핀, 아이스크림 용기, 치즈, 베이킹 소다 등 다양한 식료품을 이용해 테스트를 진행하고 로보그로서리의 성능을 검증했다고 밝혔다.
장길수 ksjang@irobotnews.com
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'전문서비스로봇' 카테고리의 다른 글
| HL만도,인천국제공항서 주차로봇 ‘파키’ 실증한다 (0) | 2024.07.05 |
|---|---|
| 아이오크롭스, 스마트팜 자율주행 로봇 'HERMAI' 출시 (0) | 2024.07.05 |
| 생추어리 AI, BDC캐피털과 인BC로부터 전략적 투자 받아 (0) | 2024.07.04 |
| 中 고속철도, 2세대 AI 지능형 검사 로봇 시험 운영 (0) | 2024.07.04 |
| 中 남방과기대 연구팀, 4족 보행 로봇 발바닥에 비전시스템 탑재 (0) | 2024.07.01 |