척추 손상이나 운동 장애를 갖고 있는 사람들은 스스로 음식을 먹는 게 힘들다. 간병인이 매일 숟가락, 포크 등을 이용해 음식을 떠먹여주지만 쉽지 않은 일이다. 장기간 간병하다 보면 번아웃에 빠질 수 있다.
장애를 가진 사람들이 스스로 음식을 먹을 수 있도록 도와주는 로봇 급식 장치가 있지만, 이들 장치는 사전에 프로그래밍된 동작만을 수행하며, 사람과 음식의 종류에 맞춰 로봇을 따로 세팅해야 한다. 이들 장치는 음식을 사람의 입 안에 넣어주기보다는 사람의 입 앞까지 가져다준다. 동작이 불편한 사람들에게는 입 바로 앞에 있는 음식을 먹는 것도 쉽지 않은 일이다.
美 스탠포드대 연구팀은 다양한 종류의 음식을 입 안에 자연스럽게 넣어주고, 숟가락이나 포크 등 도구를 안전하게 빼는 로봇 알고리즘을 개발했다. ▲음식물에 포크를 삽입하는 각도와 속도를 평가하는 알고리즘 ▲ 로봇 팔을 사용해 음식을 숟가락에 밀어넣는 알고리즘 ▲ 자연스럽고 편안한 방식으로 사람의 입안에 음식을 넣어주는 알고리즘 등이다.
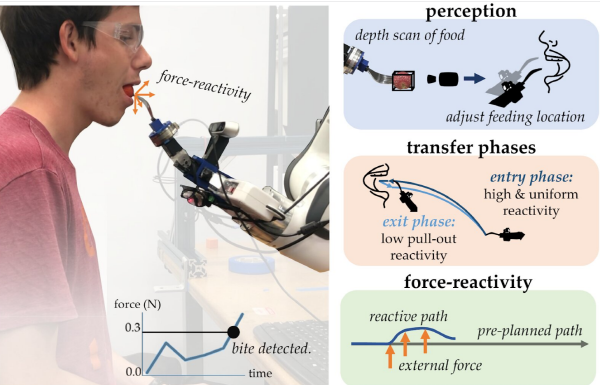
연구팀은 시각적 피드백과 촉각 피드백을 제공하는 비전 카메라와 힘/토크 센서를 로봇 팔에 장착했다. 입안에 음식을 안전하게 넣어주기 위해선 사람의 얼굴 특징과 입의 위치를 정확하게 인식해야 한다. 입안에서 포크를 넣고 빼는 과정에서 힘 조절에 실패하면 사람을 다칠 수 있다. 음식의 종류에 따라 로봇의 동작 패턴도 바뀌어야한다. 두부를 입안에 넣는 것과 브로컬리를 입안에 넣는 것은 다른 동작 궤적을 요구한다.

연구팀은 겉보기에는 같지만 부스러지는 수준이 다른 음식, 그리고 만져보면 부드럽지만 포크로 찍어보면 예상보다 단단한 음식 등 다양한 음식을 로봇에게 제공해 훈련을 시켰다. 로봇은 비전 카메라와 햅틱(촉각) 정보를 활용해 식품의 취약성(부스러지기 쉬운 정도)와 견고함을 판단한다. 이 판단에 따라 로봇은 견고한 물체의 경우는 보다 빠른 수직 이동을, 그리고 취약한 물체의 경우는 보다 부드러운 각도의 움직임을 전략적으로 선택해 즉시 동작한다.
로봇 보조 급식에 대한 기존의 접근법은 종종 다른 종류의 음식을 다루기 위해 도구를 바꿔야 한다는 문제가 있다. 스탠포드대 연구팀은 두번째 로봇팔을 활용하는 법을 택했다. 음식의 종류에 맞게 한쪽 팔을 사용하다 완전히 성질이 틀린 다른 음식이 있으면 다른 도구를 갖고 있는 두 번째 로봇 팔을 활용하는 것이다.
스탠포드대 연구팀은 음식이 사람의 입으로 들어간 직후 동작을 멈추고, 사람이 음식을 무는 순간을 감지하고, 도구를 빼는 통합 로봇 시스템을 개발했다. 이 시스템은 손목 관절과 같은 기능을 갖고 있는 하드웨어를 포함하고 있다. 로봇은 컴퓨터 시각에 의존해 식기에 들어있는 음식을 감지하고, 음식이 입에 접근할 때 사람의 중요한 얼굴 특징을 식별하며, 음식이 입으로 들어갔을 때를 인식한다. 이 시스템은 음식을 받아먹는 사람이 편안하게 사용할 수 있도록 설계된 힘 센서를 활용한다.
장길수 ksjang@irobotnews.com
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'전문서비스로봇' 카테고리의 다른 글
| 중국 메그비, 물류창고용 팔레트 셔틀 국내 시장에 선봬 (0) | 2023.04.13 |
|---|---|
| 편의점 CU-모빈, 배달 로봇 실증 사업 진행 (0) | 2023.04.13 |
| 경기도, 어린이집 240개소에 대화형 로봇 대여 (0) | 2023.04.13 |
| 美 사이드 로보틱스, 잔디깎이에 ‘CAN오픈’ 통합 플랫폼 적용·출시 (1) | 2023.04.13 |
| 딥브레인AI, 생성형 AI가 만든 얼굴 기반 대화형 가상인간 출시 (0) | 2023.04.13 |