중국에서 용접 등 고위험 작업을 원격으로 오차없이 장시간 수행하는 휴머노이드 로봇이 등장했다.
16일 중국 로봇 전문 포털 중국로봇망에 따르면 중국 케플러(KEPLER, 开普勒)가 휴머노이드 로봇 ‘K2 범블비(大黄蜂)’의 원격 용접 시연을 공개했다.
VR 헤드셋을 착용한 작업자가 지상 제어실에서 손을 들어 올리거나 몸을 돌리고 용접 토치의 각도를 조절하면 지상 20m 상공에 있는 K2 범블비 휴머노이드 로봇이 그대로 따라했다.
로봇은 0.1 밀리미터(mm) 수준의 정밀도로 사람의 동작을 재현하면서 30kg 무게 로봇팔로 안정적으로 용접 토치를 제어한다. 연속으로 8시간 동안 흔들림없는 자세를 유지한다. 전기 아크(electric arc)가 정확하게 빛을 내고 용접 토치가 부드럽게 움직이면서 용접 이음매가 균일하게 형성됐다. 모든 과정이 오차없이 매끄럽게 이뤄지면서 고난이도 용접 작업이 수행됐다.
이는 중국 최초로 인간-로봇 협업 고공 용접 작업이 이뤄진 것이라고 매체는 전했다. 위험도가 높은 산업 현장에서 휴머노이드 로봇 활용도를 높이면서 고하중+장시간 작동+자율 업그레이드 등 산업용 성능도 갖췄다고 회사는 설명했다.

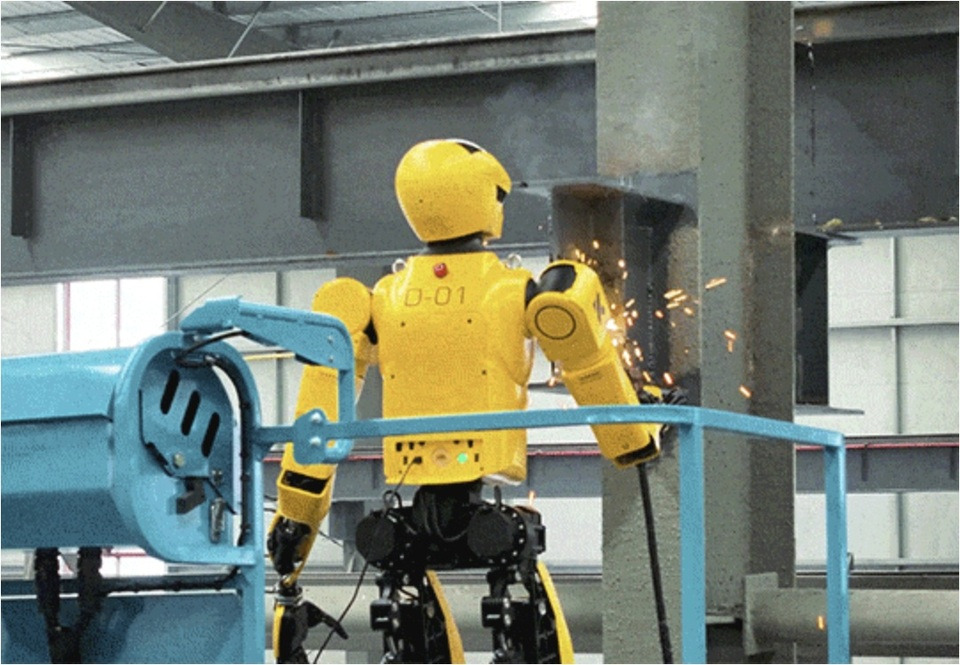

▲중국 케플러가 휴머노이드 로봇 ‘K2 범블비’의 원격 용접 시연 모습을 공개했다. (사진=중국로봇망)
휴머노이드 로봇을 통해 작업자는 추락 위험이나 고온, 용접 유해가스에 노출되지 않고 힘, 시각, 촉각, 청각 등 감각을 활용해 몰입하면서 작업 현장에 있는 듯한 느낌을 받는다. 8시간 연속 작업 시간 동안 로봇이 각 작업의 힘 제어 및 경로 조정 데이터를 기록해 자율 최적화를 위한 경험도 축적한다.
100밀리초 미만의 초저지연 시간과 0.1mm의 정밀한 연동, 또 30kg의 하중과 초장시간 배터리 수명을 통해 무거운 하중을 들고도 장시간 작업할 수 있다는 점이 가장 큰 강점이다.
케플러가 자체 개발한 몰입형 전신 원격 제어 시스템은 모션 캡처, 저지연 통신, 힘 피드백 등 기술을 통합해 정밀한 1:1 제어를 지원한다. 작업을 실행하고 데이터를 축적하면서 자율적으로 진화할 수 있는 폐쇄루프 시스템이다. 용접 장비가 저항을 받으면 힘 피드백 시스템이 실시간으로 압력을 전달하고, 용접 부위에서 불꽃이 튀면 VR 헤드셋으로 생생하게 보여준다.
1시간 충전에 8시간 작동할 수 있는 동작 주기도 강점이다. 동시에 하중 변화, 경로 이탈, 힘 제어 조정 등 동작 데이터를 기록한다. 실제 환경과 시뮬레이션 환경 간 양방향 매핑을 통해 로봇이 반복적인 원격 제어 가운데에서도 동작 전략을 최적화한다. 특정 유형의 공작물을 처음 용접할 때 작업자가 미세 조정을 하는데, 3~5차례 원격 훈련을 거치면 로봇이 가공물의 허용 오차 범위에 자율적으로 적응한다. 이 경우 작업자의 개입 빈도가 줄어들면서 갈수록 숙련되는 진화를 할 수 있는 것이다.
유효정 기자 robot3@irobotnews.com
저작권자 © 로봇신문 무단전재 및 재배포 금지
'휴머노이드로봇' 카테고리의 다른 글
| 獨 뉴라로보틱스-보쉬, 휴머노이드 로봇 분야 전략적 파트너십 체결 (0) | 2026.01.19 |
|---|---|
| 中 하프 마라톤 대회 앞서 휴머노이드 로봇 개발자 교육 (0) | 2026.01.19 |
| “로봇 가사 현실화” 中 가정용 로봇 기업 퓨처링로봇, 400억원 투자 유치 (0) | 2026.01.15 |
| 獨 셰플러, 향후 5년간 英 휴머노이드 로봇 수백대 배치 (0) | 2026.01.15 |
| 롯데글로벌로지스, ‘AI 이족보행 휴머노이드 로봇’ 물류현장 실증 (0) | 2026.01.15 |