▲인간의 눈 동공 원리에서 착안해 적응형 촉각 센서를 개발했다. (사진=화남이공대)
중국 화남이공대(South China University of Technology) 연구팀이 인간의 눈 동공 원리에서 착안해 적응형 촉각 센서를 개발했다고 밝혔다.
연구팀은 차세대 협동 로봇의 기술적인 한계로 꼽혀온 '정밀 촉각'과 '원거리 근접 감지'를 하나의 센서로 동시에 구현했다고 설명했다.
연구팀은 이번 연구 성과를 국제 학술지 ‘익스트림 매뉴팩처링 저널(International Journal of Extreme Manufacturing)’에 게재했다. (논문 제목:A bio-inspired proximity-tactile sensor array with beyond-extreme detection depth for embodied intelligence)
연구팀에 따르면, 협동 로봇 개발자들은 그동안 근본적인 물리적 딜레마에 직면해 있었다. 섬세한 물체를 잡으려면 작고 빽빽하게 배열된 센서 전극이 필요하지만, 멀리서 접근하는 사람의 손을 감지하려면 전기장을 넓게 투사할수 있는 큰 전극이 필요했다. 작은 센서는 정밀하지만 감지 거리가 짧고, 큰 센서는 멀리 감지하지만 해상도가 떨어지는 것이 물리적 한계가 있었다.
시에잉시(Xie Yingxi) 교수팀은 이같은 한계를 인간의 눈에서 해법을 찾아 새로운 돌파구를 마련했다. 연구팀은 인간 눈의 '동공 근접 반사(pupillary near reflex)' 원리에 착안해 전기적 특성을 능동적으로 변화시킬수 있는 유연한 정전용량형 센서 어레이를 개발했다.
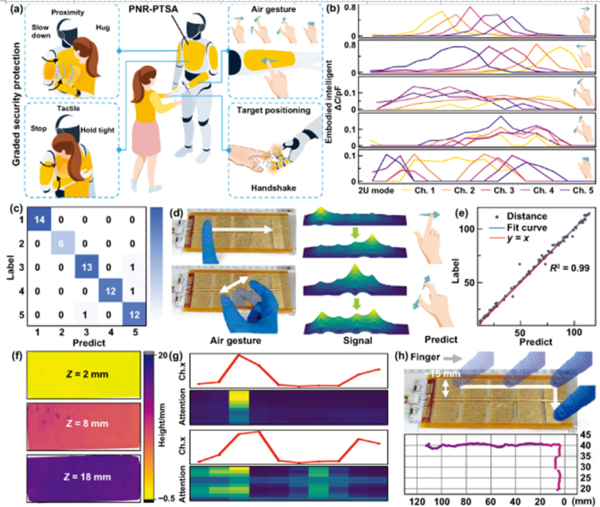
▲적응형 촉각 센서의 활용과 실험 측정값.
이 기술이 핵심은 센서 위에 위치한 '동적 차폐층(dynamic shielding layer)'에 있다. 시에잉시 교수는 "책을 읽을 때 동공이 수축해 세밀한 부분을 선명하게 포착하고, 어둡고 먼 곳을 볼 때는 동공이 확장해 더 많은 빛을 받아들인다"며 "우리는 이 원리를 전기장에 그대로 적용했다"고 설명했다.
연구팀이 개발한 적응형 촉각 센서는 정밀 가공 부품의 모서리처럼 고해상도 촉각이 필요할 때는 차폐층이 주변 영역을 선택적으로 가려 전기적 초점을 최소 단위로 좁힌다. 반대로 장애물이나 사람을 원거리에서 감지해야 할 때는 차폐층이 넓은 영역의 마스킹을 해제해 전극을 전환한다.
연구팀은 이 센서가 전극의 물리적 크기와 전기적 연결 방식을 분리하는 방식으로 기존 이중 모드 센서 대비 최대 감지 깊이를 104.56% 끌어올렸다고 밝혔다. 90mm 이상의 근접 감지 거리는 빠르게 움직이는 로봇 팔이 작업자와 충돌 직전 멈출 수 있는 결정적인 시간을 확보해준다. 접촉 감도 역시 수 그램(g)의 가벼운 압력부터 최대 400kPa의 강한 압력까지 감지할 수 있기 때문에 정밀도를 유지할 수 있다.
다만 실용화까지는 넘어야 할 장벽이 남아 있다. 특히 정전용량 방식의 특성상 중장비의 전자기 노이즈, 온도·습도 변화에 따른 오작동 가능성이 해결해야 할 과제다.
연구팀은 이러한 과제가 해결되면 이 동적 센서 기술이 협동 로봇의 판도를 바꿀 것으로 내다봤다. 근접 카메라와 촉각 압력 패드를 별도로 장착하는 기존 방식 대신, 하나의 적응형 전자 피부만으로 주변 공간 인식과 사람·사물과의 안전한 상호작용을 모두 구현할 수 있다는 것이다.
백승일 기자 robot3@irobotnews.com
저작권자 © 로봇신문 무단전재 및 재배포 금지
'연구개발' 카테고리의 다른 글
| 美 유타대 연구팀, 편마비 환자용 고관절 착용 로봇 개발 (0) | 2026.03.11 |
|---|---|
| GIST, 손끝 ‘힘 감각’까지 배우는 로봇 AI 기술 개발 (0) | 2026.03.11 |
| 英 사우샘프턴대, 새와 물고기에서 영감을 얻은 수중용 로봇 날개 개발 (0) | 2026.03.10 |
| '파쿠르' 동작 수행하는 휴머노이드 로봇 기술 개발 (0) | 2026.03.09 |
| 美 노스웨스턴대, '운동 지능' 갖춘 모듈형 로봇 개발 (0) | 2026.03.09 |