영국 킹스칼리지 런던(King's College London) 연구팀이 생물에서 영감을 받아 촉각 로봇의 설계 및 훈련 기간을 기존 18개월에서 2주로 대폭 줄일 수 있는 기술을 개발했다고 3일(현지 시간) 밝혔다.
이 기술은 고양이 발바닥·코끼리 코·문어 촉수 등 자연계의 감각기관 구조를 인공 센서 설계에 응용한 것이 핵심이다. 고양이 발바닥·코끼리 코·문어 촉수의 촉수는 평평하지 않지만 다른 어떤 동물보다도 민감하게 촉각을 인지할 수 있다.
연구팀은 이번 연구 성과를 전문 학술지인 '사이보그 & 바이오닉 시스템(Cyborg & Bionic Systems)'에 게재됐다. (논문 제목:SimTac: A Physics-Based Simulator for Vision-Based Tactile Sensing with Biomorphic Structures)
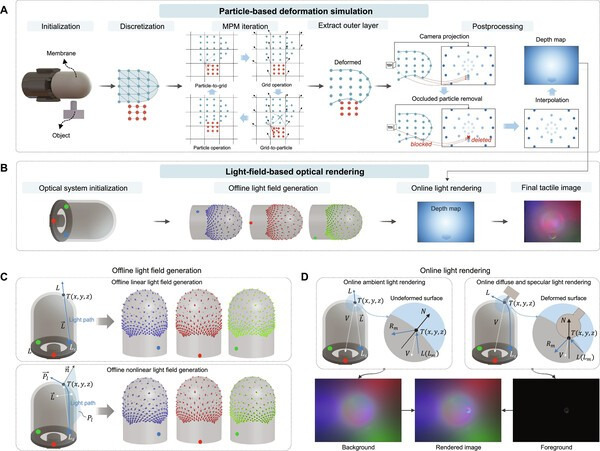
▲생체 형태 구조를 갖춘 비전 기반 촉각 센서를 위한 물리 기반 시뮬레이터
이번 연구는 킹스칼리지 런던 연구팀이 올해 1월 '네이처 커뮤니케이션즈(Nature Communications)'에 발표한 연구 성과를 결합했다.(논문 제목:Training tactile sensors to learn force sensing from each other) 연구팀은 사람은 통합 촉각 기억 시스템을 통해 여러 손가락과 손바닥 전체의 파지(grasp) 힘을 조율함으로써 안정적이고 정교한 물체 조작을 실현할 수 있다고 밝혔다.
연구팀은 "자연의 가장 뛰어난 사례들로부터 교훈을 얻어 다양한 과제를 수행할 수 있는 다양한 프로토타입과 모델을 개발했다"고 밝혔다. 연구팀은 고양이 발바닥, 문어 촉수, 코끼리 코를 가상으로 구현했으며, 이를 통해 서로 다른 촉각 센서 설계가 실생활에 활용 가능한 더 나은 프로토타입 개발에 어떻게 기여할 수 있는지를 규명했다.
샨 뤄(Shan Luo) 킹스칼리지 런던 교수는 "사람의 뇌는 딸기와 야구방망이를 잡을 때 필요한 힘의 차이를 직관적으로 안다"며 "이번 연구는 산업용 로봇부터 차세대 보조기기까지 다양한 분야의 개발 병목 현상을 해소할 수 있을 것"이라고 말했다.
연구팀은 "이번 연구는 설계 공간을 획기적으로 확장한 것"이라며 "실물 촉각 로봇을 기존보다 훨씬 짧은 시간 안에 제작하는 데 활용될 수 있을 것"이라고 강조했다.
연구팀이 이번에 개발한 플랫폼 '심택(SimTac)'은 가상 환경에서 실제 사물 데이터를 기반으로 센서를 시뮬레이션하고 훈련해, 기존의 시행착오 방식을 제거했다.
연구팀의 쉬양 장(Xuyang Zhang) 박사과정 학생은 "기존 시뮬레이션 기술은 손가락 끝처럼 평평한 센서만 구현할 수 있었지만, 심택은 다양한 생체 형태의 센서 프로토타입을 빠르게 생성할 수 있다"고 설명했다.
연구팀은 또한 인간의 촉각 기억 방식을 모방한 AI 모델 '젠포스(GenForce)'도 개발했다. 이 모델은 손가락 하나의 감각 데이터를 2D 이미지로 변환해 로봇 손 전체에 힘·촉각 정보를 적용하는 방식으로, 훈련 비용을 기하급수적으로 절감할 수 있다. 고정밀 힘·토크 센서 한 개당 가격이 1만 파운드(약 1700만 원)를 넘는 점을 감안하면 산업적 파급 효과가 클 것으로 기대된다.
연구팀은 향후 생체 모방 촉각 로봇을 완전히 자체 제작해, 촉각 로봇 기술이 구현할 수 있는 설계 영역의 한계를 더욱 넓혀나갈 계획이라고 밝혔다.
저작권자 © 로봇신문 무단전재 및 재배포 금지
'연구개발' 카테고리의 다른 글
| GIST-뉴욕주립대, 뇌성마비환자 보행 개선 로봇 재활기술 개발 (0) | 2026.03.06 |
|---|---|
| 소프트 로봇 기술로 집단 폐사 위기 바다사자 살린다 (0) | 2026.03.06 |
| 마이크로 로봇 군집, 접촉 없이 유체 토크로 물체 조작 가능해 (0) | 2026.02.27 |
| 인하대, 로보틱스 학술대회 'IEEE ICRA'서 우수 연구 성과 (0) | 2026.02.26 |
| 日 NTT도코모-게이오대, 상용 5G 활용해 햅틱 로봇 원격 무선조작 실증 (0) | 2026.02.26 |