
▲USCD 연구팀이 개발한 웨어러블 장치.
미국 캘리포니아대 샌디에이고(UCSD) 연구팀이 사용자가 이동 중이거나 격하게 움직이는 상황에서도 자연스러운 제스처로 기계와 로봇을 제어할 수 있는 차세대 웨어러블 기술을 개발했다.
기존 제스처 센서 기반 웨어러블 장치는 사용자가 가만히 있을 때는 잘 작동하지만, 걷거나 뛰면 몸의 흔들림 때문에 센서가 오작동하기 쉽다. 연구팀은 스트레처블 전자기기와 딥러닝 기술을 결합해 기존 웨어러블 장치의 신호 왜곡 문제를 해결했다.
이번 연구 성과는 전문 학술지인 ‘네이처 센서스(Nature Sensors)’에 발표됐다. (논문 제목:A noise-tolerant human–machine interface based on deep learning-enhanced wearable sensors)
이 웨어러블 장치는 동작 센서, 근육 센서, 블루투스 마이크로 컨트롤러, 신축성 있는 배터리 등으로 구성돼 있으며 부드러운 전자 패치 형태로 제작해 팔이나 손목에 착용할 수 있다. 이 패치는 사용자의 동작 신호를 실시간으로 AI가 분석해 노이즈를 제거하고, 제스처 명령만을 추출해 기계나 로봇 팔 등 외부 장치를 제어한다. 딥러닝 알고리즘을 통해 걷거나 달리는 동작에서 나오는 불필요한 신호(노이즈)와 실제 손으로 내리는 명령(제스처)을 구분했다.
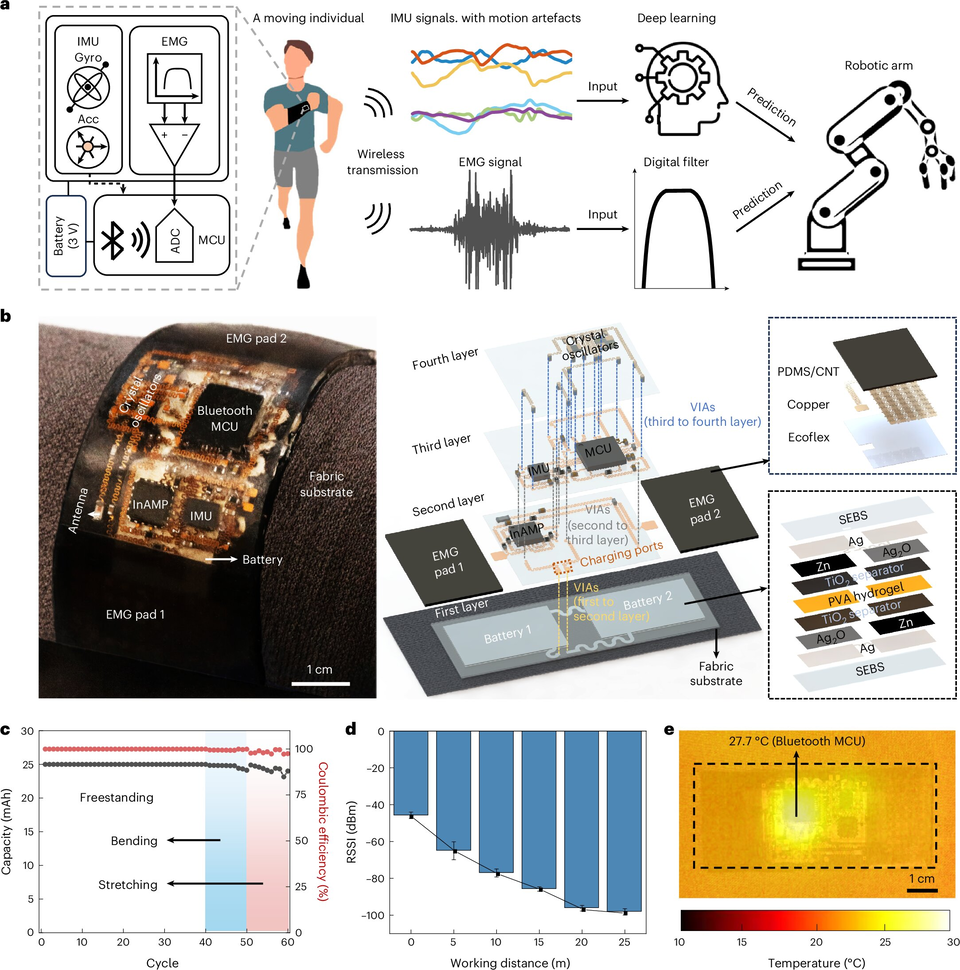
▲잡음(노이즈)에 강한 인간-기계 인터페이스 개요
연구팀은 달리기, 고주파 진동, 파도 등 실제 환경을 모사한 조건에서 웨어러블 시스템을 시험한 결과 높은 정확도와 낮은 지연시간을 확보했다고 설명했다. 이 기술은 재활 환자, 산업 현장의 작업자, 응급 구조요원, 잠수사 등 움직임이 많은 환경에서 장비를 조작해야 하는 다양한 분야에 활용될 수 있을 것으로 기대된다.
연구팀은 원래 군 잠수사가 수중 로봇을 조종하는 프로젝트에서 영감을 얻었다. 움직임에 의한 간섭이 수중 환경만의 문제가 아니라 웨어러블 기술에서 전반적으로 발생하는 문제라는 점을 깨닫고 연구에 착수했다고 소개했다.
연구팀은 AI 기반 제스처 인식 기술이 향후 차세대 웨어러블 기기와 인간–기계 인터페이스(HMI) 발전에 중요한 전기를 마련할 것으로 기대하고 있다.
백승일 기자 robot3@irobotnews.com
저작권자 © 로봇신문 무단전재 및 재배포 금지
'인공지능' 카테고리의 다른 글
| 美 국세청, 직원 25% 감원 후 AI 에이전트 도입 (0) | 2025.11.25 |
|---|---|
| 中 샤오미, 자율주행·체화지능 통합 파운데이션 모델 ‘미모-임바디드’ 공개 (0) | 2025.11.24 |
| 범용 로봇 AI 스타트업 ‘피지컬 인텔리전스’, 6억 달러 신규 투자유치…설립 1년만에 기업가치 3배 (1) | 2025.11.21 |
| 엔비디아, 3분기 역대급 실적 기록…“AI 거품은 없었다” (0) | 2025.11.21 |
| 조선산업의 초격차 승부수…HD현대, UNIST·울산대와 ‘AI 동맹’ (0) | 2025.11.21 |