|
지난 21일 휘닉스 평창에서 열린 ‘KRoC 2021’에선
RED 쇼(Robot Engineering & Design Show) 행사가 코로나로 인해 온라인으로 개최되었다. RED쇼란 실세계의
문제를 공학적, 디자인적으로 해결하기 위해 창작한 로봇 및 디자인 작품들을 시연함으로써 창의적 아이디어를 발굴, 공유, 홍보하기 위해
한국로봇산업진흥원과 한국로봇학회가 공동으로 개최한 행사다. 학부생 부문에서는 한양대 팀(윤요한, 손상현, 김형준, 황인진)이 '두두(편심축 바퀴와 크랭크 구조를 이용한 노면 적응형 로봇)', 경북대 팀(황현상, 박재용, 오영훈, 신가은)이 'friendog', 경북대 팀(박민석, 김제규, 신준영)이 '의자와 자세교정 밴드를 결합한 능동형 자세 교정 시스템', 건국대 팀(정효승)이 '가상현실을 이용한 인공지능 학습 데이터 생성기'. 경북대 팀(손서희, 손봉현, 이준경, 이장훈)이 '소형 주차 이동 로봇(Atlant)', 경북대 팀(박종혁, 박주동, 윤영훈)이 '균형을 잡아주는 웨어러블 꼬리 로봇', 아주대 팀(이정빈, 박재일, 장경훈, 김지홍)이 '딥러닝을 이용한 비정형 식재료 튀김용 로봇' 등을 출품했다.
21일 오후에 열린 시상식에서는 일반부문에서 한국과학기술연구원(KIST) 팀(박성우, 황동현), 한양대 ERICA캠퍼스 팀(최영진, 이건, 김경태), 고려대-KIST 팀(최인구, 김은찬, 양성욱)이 우수상을, 한국기계연구원 팀(고두열, 김정중, 박진성, 김창현)이 '비정형 작업 및 환경에 적용 가능한 적층형 자율 모바일 매니퓰레이터(SAMM)' 작품으로 영예의 최우수상(한국로봇산업진흥원장상)과 상금 150만 원을 받았다.
학부생 부문에서는 한양대 팀(윤요한, 손상현, 김형준, 황인진), 건국대 팀(정효승), 경북대 팀(손서희, 손봉현, 이준경, 이장훈)이 우수상을, 경북대 팀(박종혁, 박주동, 윤영훈)이 '균형을 잡아주는 웨어러블 꼬리 로봇' 작품으로 영예의 최우수상(한국로봇산업진흥원장상)과 상금 150만 원을 받았다.
일반 부문 최우수상을 수상한 한국기계연구원 팀(고두열, 김정중, 박진성, 김창현)의 '비정형 작업 및 환경에 적용 가능한 적층형 자율 모바일 매니퓰레이터(SAMM)' 작품은 다양한 산업현장에 로봇을 도입하는 사례가 늘고 있지만, 아직 현장에서 활용중인 로봇의 역할이 단순 물류나 조작 작업에 국한되어 있으며, 실질적으로 다양한 작업 환경과 다품종 소량생산에 적용하기 위한 수요를 기술적으로 따라가지 못하고 있는 상황이다. 이러한 문제를 해결하고자 다양한 작업 환경 변화에 따라 손쉽게 구성이 가능한 적층형 자율 모바일 매니퓰레이터를 개발하였다. 이 작품의 시스템 개념 및 특징으로는 △모바일 매니퓰레이터의 각 기능별 모듈 개발 △상황에 맞는 모듈을 적층하여 전체 시스템 구성 △기계, 신호 인터페이스, SW의 계층적 모듈화 구조 △인공지능을 활용한 자율주행, 물체인식 및 파지를 들수 있다. 창고내 물류 이송 작업이나, 스마트 공장내 부품 공급과 같은 작업에 활용할 수 있다.
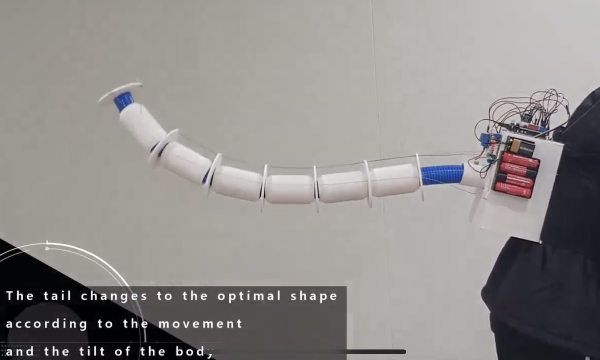
학생 부문 최우수상을 수상한 경북대 팀(박종혁, 박주동, 윤영훈)의 '균형을 잡아주는 웨어러블 꼬리 로봇' 작품은 택배업종 관련 사고 통계자료를 보니 업무 중 택배를 들다가 균형을 잃어 넘어지는 사고가 연간 11.4%를 차지하고, 균형 감각의 기능을 상실한 고령자의 균형로봇 필요성에 대해 인지하여 이러한 로봇을 개발하게 되었다. 인체기능을 확장할 수 있도록 동물에서 모방한 생체 인체 꼬리에서 영감을 받아 인체 착용형 꼬리 로봇을 개발했다. 이 꼬리 로봇은 착용자가 인체 균형을 잡을 수 있도록 인체 공학적 동작을 하며, 유연한 소재의 호스와 3D 프린터로 출력된 PLA 인공 관절로 구성되어있다. 이 로봇을 응용해 재활치료를 위한 의료보조 기구로 사용할 수 있으며 균형 장애를 가진 사람들에게 무게 중심을 잡아줘 삶의 질을 개선하는 효과를 기대할 수 있다. | ||||||||||||||||||||||||
|
조규남 전문기자 ceo@irobotnews.com
| ||||||||||||||||||||||||
| <저작권자 © 로봇신문사 무단전재 및 재배포금지> | ||||||||||||||||||||||||



'종합' 카테고리의 다른 글
| '2021년도 제1회 스토리텔링 이그나이트 경진대회' 개최 (0) | 2021.05.24 |
|---|---|
| [KRoC 2021] '제16회 한국로봇종합학술대회' 성료 (0) | 2021.05.24 |
| [KRoC 2021] 서일홍 한양대 명예교수 겸 코가플렉스 대표 특별강연 (0) | 2021.05.24 |
| [KRoC 2021] 이범희 서울대 명예교수 특별강연 (0) | 2021.05.24 |
| 'KROC 2021' 초청강연(2) (0) | 2021.05.21 |