|
KRoC 2020 개막 둘째날 오후에는 휘닉스 평창 팀버홀에서 신진연구자세션이 열렸다. 이 세션은 로봇 분야 최신 기술을 접할 기회를 제공하고, 참가자들에게 다음 세대를 이끌어갈 젊은 과학자들과 만남의 기회를 제공하는 것을 목적으로 열렸다. 이날 행사는 한양대 서태원 교수가 좌장을 맡아 진행됐으며 ETRI 최성록 선임연구원을 비롯해 5명의 신진연구자들이 발표자로 나섰다. 세종대 최유경 교수가 온라인으로 발표했다. 신진연구자들의 발표 내용을 사전 제출 자료를 바탕으로 간추려 소개한다. ◇최성록(한국전자통신연구원 인공지능연구소/선임연구원)
주제:Toward Better Robot Navigation and Perception 본 발표에서는 발표자의 로봇 주행 및 3차원 컴퓨터비전 분야의 연구 결과들을 “보다 나은 로봇 주행과 인지 기술을 만들기”라는 관점에서 소개했다. 우선 범용 로봇 주행 소프트웨어 uRON을 지난 10년간 다양한 로봇 플랫폼과 실제 환경에 적용하면서 발생한 다양한 문제점들과 그 해결책들을 제시했다. uRON은 지난 2008년부터 ETRI가 개발을 해왔으며 기술 이전 9건을 포함한 연구 실적을 나타냈다. 위치인식은 로봇 주행에서 가장 중요한 요소 기술 중 하나로 여러 환경에 두루 적용할 수 있는 기법이 부재한데, 이를 위한 위치인식 기술의 수학적 기법들과 단안 영상기반 오도메트리(monocular visual odometry) 기술을 중심으로 소개했다. 단안 영상기반 오도메트리 기술은 지면이 평평하다는 점을 활용하여 정확도와 수행시간을 크게 개선하고 단안 카메라에서 알 수 없는 변위의 크기(scale) 문제를 해결할 수 있다. 또 지면이 평평하다는 제약조건은 단안 영상을 이용한 3차원 물체 해석에 확장이 가능한데, 이를 이용한 지능형영상감지(intelligent visual surveillance) 응용도 주목된다. ◇김태균(영남대학교/조교수)
주제:Development of wall climbing robot with modular cleaning unit 다양한 외벽의 형상에 적용 가능하고 작업의 확장이 용이한 모듈형 구조의 외벽 청소 로봇을 소개했다. 또한 외벽 청소 로봇의 작업 효율을 높이기 위해 개발된 외란 보상이 가능한 힘 추종 제어 알고리즘과 Series Elastic Actuator를 이용한 제어 알고리즘, 벽면에서의 위치 제어 성능을 높이기 위한 비선형 로프 모델링 등을 다뤘다. 등반 로봇 플랫폼은 외벽에 부착되어 등하강이 가능하며 모듈형 결합부를 통해 청소 유닛의 탈부착이 용이한 구조를 가지고 있다. 등반 로봇 플랫폼에 부착 가능한 다양한 청소유닛이 함께 개발되었으며 청소면의 종류, 오염도에 따라 교체하여 사용할 수 있다. 청소유닛은 등반 방향의 수직한 면으로 2자유도의 움직임이 가능하며 벽면과의 거리나 각도가 달라질 때 적응이 가능하다. 청소유닛 작업영역의 양 끝에는 반력을 측정할 수 있는 센서가 장착되었으며 청소 성능을 일정하게 유지하기 위하여 반력을 일정하게 유지할 수 있는 힘 제어 알고리즘이 필수적이다. 청소유닛의 힘 제어는 위치 기반의 간접 제어 방식인 임피던스 제어 구조를 사용하여 구현하였다. 또한 전체 제어기는 힘 추종 임피던스 제어기에 외란 관측기와 슬라이딩 모드 제어기를 결합하였다. 제어기 목표는 등반 로봇 플랫폼과 벽면간의 거리 변화와 청소유닛 브러쉬의 회전으로 인해 생기는 외란, 시스템 파라미터의 오차로 인해 생기는 외란을 보상하는 것이다. 외란 관측기는 청소유닛과 주위 환경과의 상호작용 모델링을 기반으로 목표 힘과 실제 힘과의 차이에 대한 보상 입력을 도출하고 슬라이딩 모드 제어는 모델링 되지 않은 외란에 대해서 보상하는 역할을 한다. ◇장한뜻(인천대학교 기계공학과/조교수)
주제:Development of Self-stabilizing Variable Stiffness Actuation System for Safe Physical Human Robot Interaction 로봇 공학 분야에서 높은 기계적 강성, 정밀한 센서 그리고 빠른 계산 속도는 피드백 제어를 통한 안정성 획득과 보다 나은 제어 성능을 위해 중요한 부분을 차지하여 왔다. 이와는 대조적으로, 인간의 신체는 낮은 기계적 강성, 부정확한 센서, 느린 신경 전달 속도로 인해 인공적 시스템에 비해 피드백 제어에 있어 물리적으로 불리함에도 불구하고 안정한 움직임을 구현할 수 있을 뿐만 아니라 불확실한 환경에 대해 강건하고 적응하는 능력을 보여준다. 이러한 이유에서 많은 신경생리학 연구들은 인간의 피드백 제어보다 피드포워드 제어의 중요성을 강조하여 왔다. 많은 선행 연구에서 가상 궤도 제어 가설은 인간의 관절 강성 제어에, 내부 모델 가설은 뇌 안의 역동역학 모델에 초점을 맞추어 인간의 피드포워드 제어의 안정성과 강건성을 설명하려 노력하였다.
이러한 선행 연구 결과를 바탕으로 이번 연구에서는 인간이 불확실한 역동역학 모델을 보상하기 위해 관절 강성을 이용한다는 가설에 기반하여 가변 반경 기어와 고출력 토크 모터의 개발을 통해 기계적으로 관절 강성을 조절할 수 있는 구동 시스템을 개발했다. 실험 결과로부터 개발한 가변 강성 구동 시스템은 센서에 의한 피드백제어와 정확한 역동역학모델 없이도 안정하고 정확한 움직임 추종 성능을 보여주었다. 이러한 결과는 개발된 가변 강성 구동 시스템이 피드포워드로 제어되는 로봇의 개발에 응용될 수 있음은 물론 인간이 불확실한 환경에 적응하기 위해 강성을 활용하고 있음을 보여주는 가설을 간접적으로 지지한다. ◇최유경 (세종대학교/조교수)
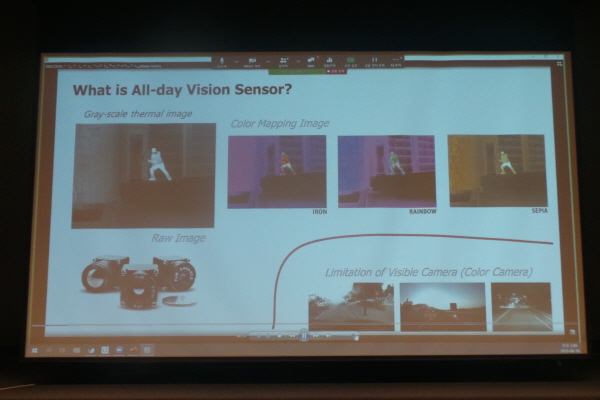
주제:올데이 비전을 위한 시지각 기술 / Visual perception for all-day vision 주간과 야간 등의 환경 변화에 강인한 알고리즘 확보를 위해 제안된 올데이 비전(All-day Vision)을 소개했다. 또 자율주행자동차를 위한 올데이 비전의 응용사례로 ▲주야 변화에 강인한 열화상 기반 깊이 정보 추정 기술 ▲다양한 이상 상황에도 강인한 보행자 인식 기술 ▲별도의 데이터 셋 촬영 없이 기존 RGB 중심의 지도 데이터를 활용한 열화상 영상 기반 위치 추정 연구를 소개했다. ◇왕웨이(Wei WANG) 박사(한양대 교수)
주제:shape memory alloy-based bioinspired soft robots 왕웨이 교수는 형상기억합금 기반의 소프트 구조와 이를 응용한 로봇의 설계 및 제조에 관해 소개했다. 소프트 힌지 그리퍼, 소프트 인치웜(inchworm) 로봇, 덩굴손(tendril) 유사 구조에 관한 기술을 중점적으로 설명했다. | ||||||||||||||||||||||||||||||
| <저작권자 © 로봇신문사 무단전재 및 재배포금지> | ||||||||||||||||||||||||||||||

'종합' 카테고리의 다른 글
| 인천TP, 뿌리기업 공정 자동화 지원사업 추진 (0) | 2020.08.20 |
|---|---|
| 경남로봇랜드재단, '2020년 로봇세일페스타' 참여기업 모집 (0) | 2020.08.20 |
| [KRoC 2020] 로봇창작 및 디자인 대회 '레드쇼(RED Show)' 성료 (0) | 2020.08.19 |
| [KRoC2020]최우수논문 시상식 및 만찬 (0) | 2020.08.19 |
| [KRoC 2020]LG전자 노진서 전무 기조강연 (0) | 2020.08.19 |