18일 ‘KRoC 2020’에선 ’KROS 레드쇼(RED Show)‘가 열렸다. 레드쇼는 실세계의 문제를 공학적으로, 디자인적으로 해결하기 위해 창작한 로봇 및 디자인 작품들을 시연함으로써 창의적 아이디어를 발굴, 공유, 홍보하기 위한 행사다. 코로나 19로 인해 심사 및 시상식은 온라인으로 진행됐다.
이번 행사에 발표된 제품은 협동로봇-비전통합 시스템인 '인디아이'(뉴로메카), 태엽 스프링을 이용한 슈팅 매니퓰레이터(서울과학기술대), 원격 조작을 통해 작업 치료 보조가 가능한 치료사-협동 소프트 손재활 시스템(한국과학기술원), 초경량 바이오닉 암(성균관대), 소셜 로봇 솔루션 '모카'(한성대), 미래 도시형 사족보행 로봇 '에이딘 식스'(성균관대), 어깨 절단자를 위한 웨어러블 sEMG 측정용 베스트 및 어깨 견착용 로봇 팔(한양대), 원두-실내 자율주행 커피배달 로봇(홍익대), Wearable Visual-Inertial Hand Tracking Interface(서울대), 절단 환자의 삶의 질 향상을 위한 라켓 스포츠용 의수의 개발(서울대, 한국과학기술원), 앙꼬(울산과학기술원), 고령자 및 장애인을 위한, 식사보조 및 식사이력 관리 기능을 가지는 돌봄 로봇 플랫폼(전자부품연구원), 바디 트래킹을 이용한 로봇 안전 감시 시스템(아주대), 팔꿈치의 양 방향 운동 보조 소프트 엑소스켈레톤 로봇에 대한 확률적 모델 기반 강화학습 제어 실험(연세대), Biped Robot CYBO(카이스트) 등이 시연됐다. 이밖에 학생부에서도 다양한 로봇들이 출품됐다.
이날 저녁 만찬에선 시연된 30개의 작품에 대해 온라인 시상식이 개최됐다. 일반 부문에선 한양대학교의 ‘어깨 절단자를 위한 sEMG 측정용 베스트 및 어깨 견착용 로봇’(최영진, 김선홍, 이슬아)이 최우수상을, 홍익대학교의 '원두-실내 자율주행 커피배달 로봇'(박정혁, 김반석, 서지원, 이주희, 정미경)이 우수상을 수상했다.
최우수상을 수상한 한양대학교는 유연한 소재와 견고한 소재를 혼합, 상완 절단 이상의 수준의 절단자를 위한 웨어러블 sEMG(surface EMG) 측정용 베스트(vest)를 제작하고, 기계학습 알고리즘으로 제어되는 로봇 팔을 개발했다.
베스트는 어깨절단자의 착용감 및 제작성을 고려해 개발한 sEMG 측정용 소켓이다. 견갑대 움직임으로부터 발생되는 근전도 신호를 측정하는 데 사용된다. 컨볼루션(convolution) 신경망을 통해 측정된 근전도 신호로부터 사용자의 의도를 파악하고, 분류된 동작에 따라 어깨에 견착된 로봇 팔을 구동한다. 의수 제어 용도뿐 아니라 생체 신호 모니터링을 위한 스마트 웨어로도 활용 가능하다.
로봇 팔은 사람의 팔에 있는 관절 구동 범위를 모사한 5자유도 전기모터 구동된다. 어깨에 견착해 사용하기 때문에 경량화에 중점을 두고 설계됐다. 현재 어깨절단환자에 적용할 것을 고려해 연구를 진행하고 있으며, 견갑대의 움직임에 따른 근육 신호들의 조합을 통해 로봇 의수의 움직임을 적용한다.
홍익대학교가 개발한 원두는 실내 카페에서 커피를 배달하기 위해 제작됐다. 이들은 커피 배달 기능은 물론, 사용자에게 즐겁고 의미 있는 경험을 주기 위해 공학적, 디자인적 시각으로 로봇에 접근했다. 로봇의 위치와 자세를 추정하고 장애물을 감지하기 위해 언코더 DC모터, 관성 측정 장치, 3D 깊이 카메라, 라이다 등을 장착했다. 구동은 2개의 구동 바퀴로 디퍼렌셜 드라이브(differential drive)를 하며, 추가로 4개의 옴니휠과 현가장치를 부착했다. 특징으로는 음료가 쏟아지는 것을 방지하기 위해 스윙 트레이, 인간 친화적인 플랫폼 디자인, 직관적인 UX/UI 디자인, 카페라는 사용환경을 고려한 CMF 디자인 등이 있다.
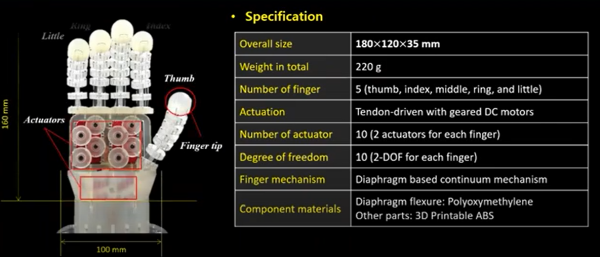
학부생 부분에선 광운대학교의 '컴플라이언트 컨티넘 매커니즘을 활용한 정교한 손 동작이 가능한 로봇 손 디자인'(선현수)가 최우수상을, 한밭대학교의 ‘험지 주행 로봇의 설계’(이보석, 오세웅, 김현태, 주현수, 백한결)가 우수상을 수상했다.
로봇 핸드 연구는 다자유도 형태의 로봇 핸드를 의인화해 정교한 손동작이 가능하도록 제작하는 것을 목표로 했다. 이를 위해 팁 틸트(tip-tilt) 3자유도 모션이 가능한 유형기구인 다이어프램(diaphragm) 메카니즘을 활용했다. 이를 컨티넘 구조에 구성해 로봇 핸드 핑거에 적용, 정교한 손동작이 가능한 프로토타입 로봇 핸드를 구현했다는 설명이다.
험지 주행 로봇 설계는 포장지형 위주인 자율주행 기술을 비정형지형으로 확대하는 것을 목표로 진행됐다. 최근 지뢰제거, 우주산업 확대 등이 이슈화되는 가운데 원형 바퀴를 대신한 비정형 로봇 수용이 늘고 있으나, 아직 이들 로봇은 주행속도가 느리고 극복 가능한 장애물이 크지 않으며 유지보수가 어렵다는 문제가 있기 때문이다.
한밭대학교는 이를 해결하기 위해 ‘휠-레그’라는 바퀴를 제작했다. 휠-레그는 이름처럼 흴 형태로 변형이 가능해 주행속도가 빠르다. 또 직경이 2.3배(약 53cm)나 늘어날 수 있어 계단 등 여러 지형에서도 이동이 가능하다.
한밭대는 이 휠-레그를 적용한 로봇 몸체에 IMU센서, GPS센서, 카메라, 젯슨 나노(Jetson Nano) 등을 설치해 사용자가 원하는 위치로 이동하도록 했다. 또한 딥 러닝을 이용해 로봇에 달린 카메라로 사람을 인식할 수 있게 했다. 이 휠은 앞으로 구조로봇, 배달로봇, 탐사로봇, 지뢰제거 로봇 등에 쓰일 수 있을 것이라는 설명이다. |
||||||||||||||||||||||||||||||
| <저작권자 © 로봇신문사 무단전재 및 재배포금지> | ||||||||||||||||||||||||||||||




'종합' 카테고리의 다른 글
| 경남로봇랜드재단, '2020년 로봇세일페스타' 참여기업 모집 (0) | 2020.08.20 |
|---|---|
| [KRoC 2020]신진연구자 세션 (0) | 2020.08.19 |
| [KRoC2020]최우수논문 시상식 및 만찬 (0) | 2020.08.19 |
| [KRoC 2020]LG전자 노진서 전무 기조강연 (0) | 2020.08.19 |
| [KRoC 2020] 전시 부스 참가업체 (0) | 2020.08.18 |