▲ 소프트 로봇 그리퍼가 딸기를 잡고 있다. (사진=WUV)
미국 웨스트버지니아대(WVU) 연구팀이 딸기와 같은 연약한 과일을 손상 없이 수확할 수 있는 소프트 로봇 그리퍼(Soft Robotic Gripper)를 개발했다고 밝혔다. 과일의 크기·곡률·색상·숙성도를 스스로 감지해 수확 작업까지 수행할 수 있는 게 특징이다.
연구팀은 이번 연구 성과를 국제 학술지 '네이처 커뮤니케이션즈(Nature Communications)'에 발표했다. (논문 제목: Sensor fusion of touch & vision in soft manipulators for fruit picking)
이번에 개발한 소프트 로봇 그리퍼는 과일의 크기와 곡률, 색상, 숙성도를 실시간으로 분석하고 수확 여부를 자율적으로 결정한다. 그리퍼의 손가락은 실리콘과 폴리우레탄 소재로 제작돼 사람 손처럼 유연하게 움직이며, 딸기처럼 압력에 민감한 과일도 손상 없이 파지할 수 있다. 딸기 수확 시에는 칼이나 가위 없이 줄기를 살짝 비틀어 분리한다.
이 기술의 배경에는 농업 현장의 구조적 문제가 있다. 과일 수확은 여전히 작업자의 경험과 육안 판단에 의존하는 경우가 많은데, 농촌 고령화와 계절 노동력 부족으로 인건비 부담이 커지고 있고 숙련도에 따른 품질 편차도 발생한다. 특히 딸기는 수확 적기가 짧고 운반 중 손상되기 쉬워 수확 후 손실률이 최대 25%에 달하는 것으로 알려지고 있다.
현재 상용화된 농업용 수확 로봇 대부분은 조명과 환경이 일정한 온실 환경을 전제로 개발됐다. 그러나 전 세계 농작물의 99.9% 이상은 야외에서 재배된다. 햇빛 변화, 비, 바람, 복잡한 식물 구조 등 실외 환경의 변화는 기존 로봇 시스템이 넘기 어려운 과제로 꼽혀왔다.
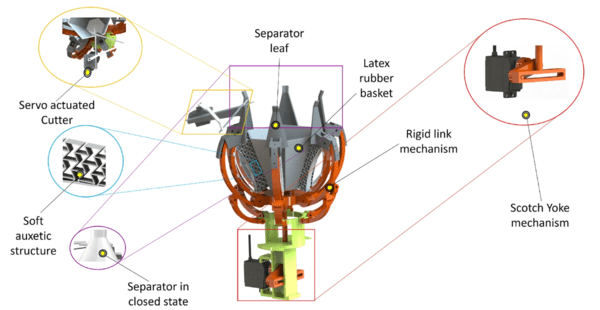
▲소프트 로봇 그리퍼의 구조. (사진=WUV)

연구팀이 개발한 소프트 그리퍼는 사람 손과 불가사리 구조에서 영감을 얻어 설계됐다. 5개의 손가락에는 신축성 광섬유 기반의 촉각·곡률 센서가 내장됐고, 손바닥 부위에는 소형 카메라와 거리 센서가 탑재됐다. 부드러운 구조 덕분에 충격 흡수 능력이 뛰어나고, 접촉 시 압력을 세밀하게 조절할 수 있다. 그리퍼는 2초 이내에 개폐 동작을 완료하고, 자체 무게의 16배가 넘는 1kg까지 들어 올릴 수 있으며, 파지 상태가 불안정할 때를 감지하는 미끄러짐 감지 기능도 갖췄다.
이번 연구를 주도한 아난드 미슈라(Anand Mishra) 교수는 "기존에는 사람이 수행하던 수확 판단을 로봇이 빠르고 정확하게 처리함으로써 과일 부패와 공급망 비용을 줄일 수 있다"고 말했다. 그는 또 "문어처럼 움직이는 소프트 로봇은 기존의 단단한 로봇과 달리 진동과 힘을 흡수하는 방식이 다르고, 물체를 만질 때도 압력과 형상을 훨씬 정교하게 인식할 수 있다"고 설명했다.
연구팀은 이 기술이 딸기 외에도 블랙베리·라즈베리·아보카도 등 손상에 민감한 고부가가치 작물 전반으로 확대 적용될 수 있을 것으로 보고 있다. 미슈라 교수는 "이번 소프트 센싱 기술은 의료용 재활 장치, 우주 탐사 시 물체 조작, 심해 탐사 등 다양한 분야로 확장도 가능하다"고 강조했다.
백승일 기자 robot3@irobotnews.com
저작권자 © 로봇신문 무단전재 및 재배포 금지
'로봇 > 부품·디바이스' 카테고리의 다른 글
| 美 톨로매틱, 유압시스템 대체할 첨단 액추에이터 소개 (0) | 2026.06.15 |
|---|---|
| 美 예일 리프트 트럭, 리튬 이온 배터리·충전기 출시 (0) | 2026.06.15 |
| 나라삼양감속기, ‘STK 2026’서 내년 하모닉 감속기 양산 계획 밝혀 (0) | 2026.06.15 |
| 삼현, 휴머노이드 관절 액추에이터 ‘액슬론’ 내달 공개 (0) | 2026.06.12 |
| 에스피지, ‘STK 2026’서 최첨단 로봇용 액추에이터·감속기 공개 (0) | 2026.06.11 |