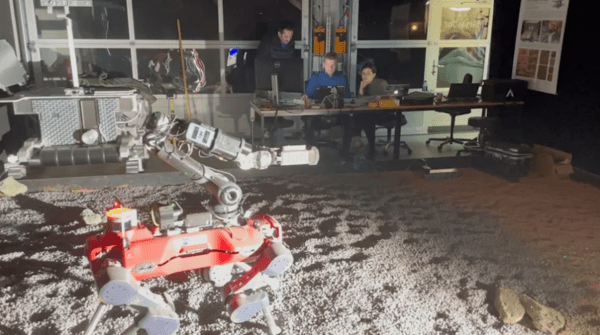
▲ 4족 로봇이 시뮬레이션 환경에서 탐사 활동을 수행하고 있다. (사진=바젤대)
스위스 바젤대학교(University of Basel) 연구팀이 반자율(semi-autonomous) 4족보행 로봇을 활용해 달과 화성 표면 탐사 속도를 크게 높일 수 있다는 것을 실험으로 입증했다.
그동안 달이나 화성 탐사에는 바퀴 타입의 이동 로봇인 '로버(Rover)'가 주로 활용됐는데 4족보행 로봇을 활용할 수 있는 길이 열릴 것으로 보인다.
연구팀은 이번 연구 성과를 지난달 31일 전문 학술지인 '프런티어스 인 스페이스 테크놀로지스(Frontiers in Space Technologies)'에 발표했다.(논문 제목:Semi-autonomous exploration of martian and lunar analogues with a legged robot using a Raman-equipped robotic arm and microscopic imager)
연구팀에 따르면, 현재 화성에서 활동 중인 탐사 로버는 지구와의 통신 지연(편도 4~22분)과 데이터 전송 한계로 인해 하루 수백 m 이동하는 데 그치며, 매 단계 지구의 명령을 기다려야 한다. 이 때문에 탐사 범위가 착륙 지점 인근으로 제한되고, 다양한 지질학적, 과학적 데이터를 수집하는 데 어려움을 겪고 있다.
연구팀은 ETH 취리히 '로봇시스템 연구소'와 협력해 4족 로봇 '애니멀(ANYmal)'에 로봇 팔을 장착하고, 현미경 이미지 취득 장비인 'MICRO'와 휴대용 라만 분광기를 탑재해 실험을 진행했다. 실험은 바젤대 화성 모사 실험시설 '마르스라보르(Marslabor)'에서 진행됐다. 4족 로봇은 자율적으로 목표 암석에 접근해 측정을 수행했다.

▲4족 로봇이 탑재된 과학장비들.
실험 결과, 반자율 다중 탐사 방식은 12~23분 만에 분석을 완료한데 반해 사람이 단계별로 지시하는 기존 방식은 동일한 분석에 41분의 시간이 걸렸다. 탐사 속도가 크게 빨라졌음에도 불구하고, 일부 시험에서는 선택된 모든 목표 암석을 정확히 식별하는 성과를 거뒀다. 로봇이 식별한 암석 종류에는 석고·탄산염·현무암·사장암 등이 포함됐으며, 이 중 일부는 미래 우주 탐사 자원으로서 과학적 가치가 높은 것으로 평가됐다.

▲4족 로봇이 암석을 탐색하고 있다.
연구팀은 "로봇이 사람의 지시를 기다리지 않고 지형을 스스로 이동하며 암석을 빠르게 스캔해 데이터를 수집할 수 있다면, 행성 표면에서 훨씬 빠른 속도로 과학적 성과를 낼 수 있다"고 밝혔다.
이번 연구는 달과 화성 탐사를 준비 중인 우주기관들이 제한된 시간 안에 더 넓은 지역을 조사하고, 과거 생명체 흔적 탐색과 자원 탐사를 동시에 지원하는 데 기여할 것으로 기대된다.
백승일 기자 robot3@irobotnews.com
저작권자 © 로봇신문 무단전재 및 재배포 금지
'로봇 > 전문서비스로봇' 카테고리의 다른 글
| 美 베크나 로보틱스, '케이스 플로우 보이스' 발표 (0) | 2026.04.07 |
|---|---|
| 피직스에이아이, 서울대기술지주 시드 투자 유치 (0) | 2026.04.07 |
| 美 앤빌 로보틱스, 550만달러 투자 유치…‘로봇계의 레고 플랫폼’ 구축 나서 (0) | 2026.04.07 |
| 경북 사과밭에 ‘과수 재배관리 로봇’ 뜬다 (0) | 2026.04.06 |
| KAIST 학부생 로버팀, 세계 최대 화성탐사 대회 본선 진출 (0) | 2026.04.03 |