
▲수상 로봇이 충돌 없이 로봇 안무를 실행하고 있다. (사진=ETH 취리히)
스위스 ETH 취리히(ETH Zürich) 연구팀이 수백 대의 로봇이 동시에 움직이는 환경에서도 충돌 없이 경로를 생성할 수 있는 군집 로봇 제어 기술을 개발했다.
연구팀은 최근 출판전 논문 공개 사이트인 ‘아카이브(arXiv)'에 공개한 논문(제목:Motion Planning for Hundreds of Floating Robots)에서 최대 500대 규모의 '수상 로봇(floating robot)'을 실시간에 가깝게 제어할 수 있는 확장형 경로 계획 시스템을 제안했다.
이번 연구는 수많은 로봇이 물 위에서 하트, 별, 문자 등 다양한 형태를 만들며 이동하는 대규모 로봇 안무를 위해 개발됐다. 사용자가 안무를 수정하면 수 분 동안 이어지는 복잡한 이동 경로를 수 초 안에 다시 생성할 수 있다.
연구팀은 "대규모 로봇 군집의 충돌 없는 움직임을 계획하는 것은 매우 어려운 문제"라며 "충돌 회피를 위해 필요한 로봇 간 상호작용이 로봇 수 증가에 따라 급격히 늘어나기 때문"이라고 설명했다.
대규모 다중 로봇 시스템에서 가장 큰 문제는 충돌 회피다. 로봇이 10대 수준일 때는 상대적으로 쉽게 경로를 계산할 수 있지만, 수백 대 규모가 되면 상황이 달라진다. 모든 로봇은 다른 모든 로봇과 충돌 가능성을 검토해야 하며, 계산량은 기하급수적으로 증가한다.
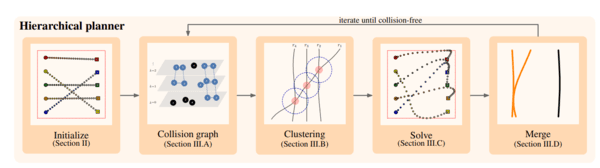
▲계층형 구조의 경로 수립 계획 개념
연구팀은 이러한 문제를 해결하기 위해 '계층형(Hierarchical) 경로 계획' 방식을 개발했다. 먼저 충돌 가능성이 높은 로봇들을 찾아 '충돌 그래프(Collision Graph)'를 구성하고, 충돌 위험 로봇들을 소규모 그룹으로 별도 추출하는 방식이다. 이를 '상호작용 클러스터(Interaction Cluster)'라고 부른다. 이후 각 클러스터는 독립적으로 최적화가 진행된다. 서로 관련 없는 그룹은 병렬 처리할 수 있기 때문에 전체 계산 속도가 크게 향상된다.
연구팀은 최대 500대 로봇을 대상으로 대규모 시뮬레이션을 수행했다. 실험 결과 로봇들은 복잡한 조건에서도 약 99% 수준의 충돌 없는 경로 생성에 성공했다.
연구팀은 이 기술이 대규모 다중 로봇 시스템의 핵심 기반 기술이 될 수 있을 것으로 기대하고 있다. 향후 GPU 기반 병렬 연산과 AI 기반 최적화 기술을 결합하면 수천 대 이상의 로봇 군집도 실시간으로 제어할 수 있을 것으로 보고 있다.
백승일 기자 robot3@irobotnews.com
저작권자 © 로봇신문 무단전재 및 재배포 금지
'로봇 > 연구개발' 카테고리의 다른 글
| 이탈리아기술원, '문어' 생체 모방 소프트 로봇팔 개발 (0) | 2026.06.11 |
|---|---|
| “사람처럼 판단하는 로봇 성큼”…KAIST, 피지컬 AI 원천기술 VOTP 개발 (0) | 2026.06.10 |
| DGIST-MIT 공동 연구팀, ICRA 2026 로봇 비전 챌린지 1위 (0) | 2026.06.09 |
| 경희대 오진영 교수팀, 차세대 전자피부 소자 개발…웨어러블 새 지평 (0) | 2026.06.09 |
| “말하면 바로 찾아준다”…5초 만에 사물 인식하는 AI 기술 개발 (0) | 2026.06.09 |