 |
||
| ▲ 아날로그-1 실험 로버(사진=ESA) | ||
유럽우주청(ESA)은 독일 항공우주센터(DLR) 등 기관과 협력해 국제우주정거장(ISS)에 위치한 우주비행사가 지구에 위치한 탐사 로버(rover)를 원격 제어할 수 있는 기술을 개발했다고 밝혔다.
이번 연구 성과는 지난 4월 발간된 로봇 전문저널인 ‘사이언스 로보틱스’에 발표됐다. 이번 연구는 앞으로 ISS뿐 아니라 달과 화성 등 행성에 가까운 궤도상에서 우주비행사들이 달 또는 행성에 위치한 로버를 원격 조작하는 길을 열 수 있을 것으로 기대된다.
DLR 소속 에론 파레이라(Aaron Pereira)는 “우주에 있는 우주비행사가 몰입적이고 직관적인 방식으로 지상에 있는 로봇 시스템을 제어한 것은 이번이 처음이다”라고 말했다. 이어 "우리의 6 자유도의 로봇제어 인터페이스는 힘 피드백 기능을 갖추고 있어 우주비행사가 탐사 로버가 느끼는대로, 심지어 탐사 로버가 만지는 암석의 무게와 응집력까지 경험할 수 있다. 이 기능은 대역폭의 한계, 조명 불량 또는 신호 지연을 보완해 실제 몰입감을 주는 데 도움을 준다. 즉, 우주비행사는 마치 현장에 있는 것처럼 느낄 수 있다"고 말했다.
ESA의 휴먼 로봇 상호 작용 연구소 로봇공학자인 토마스 크루거(Thomas Krueger)는 "로봇은 알려진 구조화된 환경에서 제한된 자율성을 발휘할 수 있지만, 알려지지 않은 비정형 환경에선 암석 샘플 수집 등 탐사 작업을 수행할 경우 일종의 '루프 내 인간('human-in-the-loop)' 감시가 필수적이다. 그러나 전송 시간의 제한 등 신호 지연의 문제 때문에 직접적인 제어는 가능하지 않다“고 말했다.
ESA는 이 같은 문제를 극복하기 위해 달, 화성 또는 다른 행성 주위를 도는 궤도상에서 로버를 직접 감독 및 제어할 수 있는 기술을 구현하기 위해 노력해왔다. 즉, 사람이 갖고 있는 유연성과 즉흥성의 장점, 그리고 인간의 명령을 수행할 수 있는 강력하고 능숙한 로봇을 기술적으로 결합하고자 했다.
 |
||
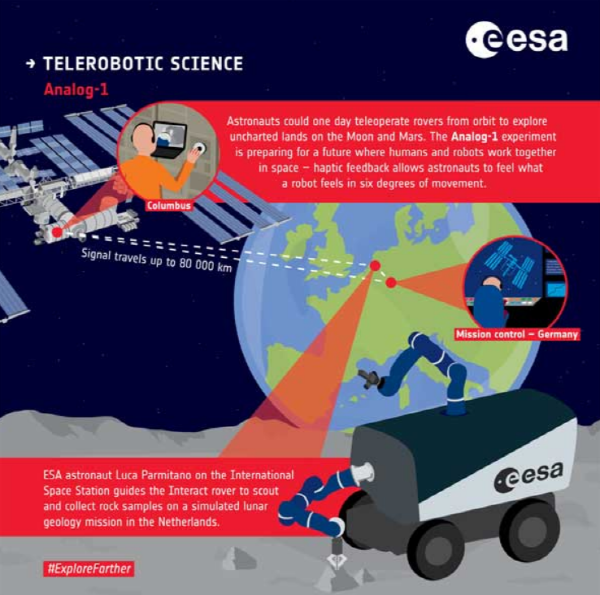
| ▲ 아날로그-1 실험에 관한 인포그래픽(이미지=ESA) | ||
ESA는 지난 2019년말 로버의 원격 조작을 위한 ‘아날로그-1’ 실험을 추진했다. ISS에 탑승한 우주비행사인 루카 파르미타노(Luca Parmitano)가 네덜란드 발켄부르크 격납고 내부에 달 환경을 조성하고, 그리퍼가 장착된 '인터랙트(Interact)‘ 로버를 원격 제어해 암석 샘플을 수집하는 임무를 수행했다. 2시간 동안 진행된 이 실험은 성공적으로 이뤄졌다. 평균 0.8초 이상의 양방향 신호 지연과 1% 이상의 데이터 패킷 손실이 발생한 것으로 나타났다.
 |
||
| ▲ 2019년 11월 ISS내 우주비행사가 6자유도 로봇팔을 원격 제어하고 있다. | ||
 |
||
| ▲ 아날로그-1 인터랙트 로버(사진=ESA) | ||
 |
||
| ▲ 아날로그-1 로버의 샘플 수집 도구(사진=ESA) | ||
 |
||
| ▲ 아날로그-1 실험이 진행된 격납고 시설(사진=EPA) | ||
400km 궤도에 위치한 ISS의 로봇 조작에 관한 신호는 정지궤도 통신위성을 통해 지구로 전송되고, 그 후 대서양 횡단 케이블을 통해 텍사스에서 유럽으로 전달되었다.
ESA측은 ISS와 지구간 신호 지체에도 불구하고, 안정적인 로봇 제어알고리즘을 설계했다고 밝혔다. 운영자가 수신하는 힘의 피드백에 지연이 있기 때문에 로봇이 바위에 부딪힌 후에도 로봇은 계속 더 이동할 수 있다. 이것은 로봇이 컨트롤러와 동기화되지 않게 되고, 로버가 마구 진동하거나 스스로를 해칠수 있는 원인을 제공한다.
이같은 현상을 방지하기 위해 연구진은 '수동성(passivity)'이라는 개념을 활용했다. 즉 운영자가 투입하는 전체 에너지 양을 보고, 원격지에선 로봇이 그 이상의 에너지를 내지 않도록 했다.
 |
||
| ▲ EPA는 이탈리아 에트나산에서 로버를 테스트한다. | ||
네덜란드 발켄부르크 격납고에서 이뤄진 로봇 조작 실험 ’아날로그-1‘은 야외 환경이 아닌 실내에서 이뤄졌다는 한계를 갖고 있다. 이에 따라 연구진은 올 여름 개최 예정인 국제로봇경진대회 ’아치스(ARCHEES)’의 일환으로 이탈리아 에트나산에서 아날로그-1의 두 번째 실험을 진행할 계획이다. 이 때 우주비행사인 루카 파르미타노가 다시 한번 인터랙트 로버를 조작하게 된다.
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'로봇 > 전문서비스로봇' 카테고리의 다른 글
| 이탈리아 볼로냐대학, 세탁 작업 자동화 기술 개발 (0) | 2022.05.11 |
|---|---|
| 키논, 중국 음식 배달 로봇 시장 점유율 1위 (0) | 2022.05.11 |
| 전기자동차 폐배터리 해체 로봇 기술 개발한다 (0) | 2022.05.10 |
| 다쏘시스템, 자동차 부품기업 '포레시아' AGV 최적화 (0) | 2022.05.10 |
| 中 양쯔강 교량에 케이블 점검 로봇 투입 (0) | 2022.05.10 |