▲ 외골격 로봇의 제어 메카니즘(이미지=이화학연구소)
일본 이화학연구소(RIKEN) ‘가디언로봇프로젝트(GRP·Guardian Robot Project)’ 팀이 외골격 로봇 착용자의 의도를 효과적으로 추측할 수 있는 머신러닝 기술을 개발했다고 테크엑스플로어가 보도했다.
가디언로봇프로젝트 팀은 거동이 힘든 장애인들을 위한 외골격 로봇 기술을 개발하고 있는데, 특히 경량 재료공학과 인공지능 기술을 조합해 신기술을 개발하고 있다.
고령화 사회에서 외골격 로봇의 중요성은 날로 높아지고 있다. 로봇 슈트는 노쇠한 몸이 더 이상 힘을 발휘하는 게 어려울 때 힘을 내도록 도와준다. 하지만 현재 개발된 외골격 로봇들은 대부분 무겁고 제어하기 힘들다. 이 때문에 외골격 로봇이 보조 도구가 아니라 장애물로 작용할 수 있다.
이화학연구소 가디언로봇프로젝트 팀은 가볍고 사용자의 힘을 방해하지 않으면서 지원할 수 있는 외골격 로봇 개발에 힘을 쏟고 있다.
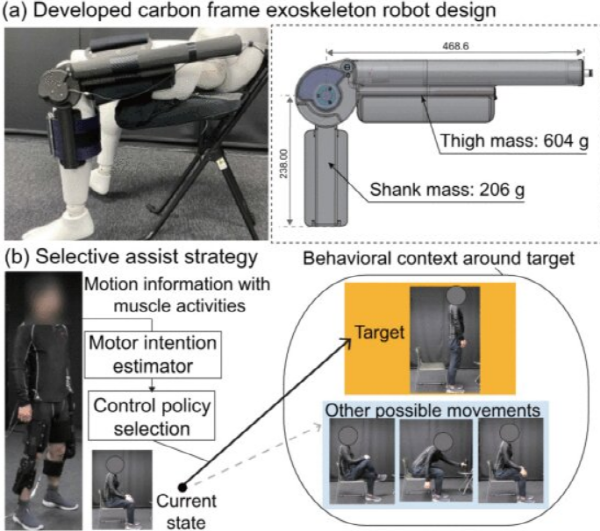
연구팀은 착용자의 허벅지와 다리 아랫부분에 장착할 수 있는 가벼운 탄소섬유 소재의 외골격 로봇을 개발했다. 외골격은 ‘역주행성(back-drivable)‘이 높은 액추에이터로 제작되어 액추에이터가 활성화되지 않아도 사용자의 움직임을 방해하지 않는다.
연구팀은 착용자의 근육 활동 측정 데이터를 기반으로 외골격 로봇이 착용자의 의도를 정확하게 읽을 수 있는 ’PU학습‘ 방법을 활용했다. PU는 ’긍정적(Positive)’이고 ‘라벨이 없다(Unlabeled)'는 의미의 축약어다. PU 분류 방법은 긍정적 라벨이 붙은 데이터와 라벨이 없는 데이터를 결합해 모호한 데이터를 사용할 수 있도록 해준다. 이를 통해 인공지능은 라벨이 붙어있지 않은 데이터로부터 학습할 수 있다.
연구팀은 실험을 위해 일어서기, 다리 꼬기, 앞으로 기울이기, 의자에 앉기 등 다양한 동작을 수행했다. 외골격 로봇은 머신러닝을 통해 착용자가 실제로 언제 일어서려 하는지 추측하고, 동작을 지원했다.
연구팀의 모리모토 준은 "인간의 움직임을 보조하기 위해 로봇 조종시 인간이 학습 데이터 없이 행동한다는 가정아래 로봇을 개발하는 것이 연구의 핵심요소"라고 말했다.
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'로봇 > 전문서비스로봇' 카테고리의 다른 글
| 中 중국과학원, 4개 마그네틱 연체 마이크로 로봇 독립 위치 제어 (0) | 2022.04.04 |
|---|---|
| 하니웰, 오토 모터스와 제휴 (0) | 2022.04.04 |
| 美 오펙스, 자동저장·회수시스템(ASRS) ‘인피니티’ 공개 (0) | 2022.04.04 |
| 이탈리아기술원, 원격 제어 아바타 시스템 개발 (0) | 2022.04.04 |
| MIT, 피자 반죽을 다루는 로봇 조작 기술 개발 (0) | 2022.04.04 |