동물처럼 ‘걸음걸이’ 바꾸는 AI 기반 4족 보행 로봇 개발

▲영국 리즈대와 UCL 연구팀이 지형에 따라 보행을 스스로 바꾸는 인공지능 4족 보행 로봇을 개발했다.
영국 리즈대와 UCL(유니버시티 칼리지 런던) 공동 연구팀이 동물처럼 지형에 맞춰 보행 방식을 자율적으로 바꿀 수 있는 인공지능(AI) 기반 4족 로봇 시스템을 개발했다고 11일 밝혔다.
이는 세계 최초의 성과로, 로봇이 미지의 환경에서도 스스로 움직임을 조절할 수 있도록 해 재난구조나 원자력 시설 해체와 같은 고위험 작업에 활용될 가능성을 높였다는 평가다.
기존 로봇은 사람의 지시 없이는 보행 방식을 바꾸기 어려웠지만, 이번에 개발된 시스템은 AI가 실시간으로 지형에 맞춰 걸음걸이를 전환함으로써 자율성을 획기적으로 높였다.
연구팀은 개, 고양이, 말 등 네 발로 걷는 동물들이 지형 변화에 따라 에너지를 절약하거나 균형을 유지하고, 위협에 빠르게 대응하는 점에 착안해 로봇에게 이러한 ‘본능적 전략’을 학습시켰다.
AI시스템은 동물이 지형 환경에 따라 ‘트로팅(trotting)’, ‘달리기(running)’, ‘도약(bounding)’ 등으로 보행을 바꾸는 방식을 모사했다. 이 프레임워크를 적용한 로봇 ‘클레런스(Clarence)’는 단 9시간 만에 필요한 전략을 학습했으며, 이는 동물들이 다양한 표면을 자신 있게 걷기까지 걸리는 며칠 또는 몇 주에 비해 현저히 빠르다.

이번 연구를 이끈 리즈대학교 기계공학과 조셉 험프리스(Joseph Humphreys) 박사과정 연구원은 7월 11일자 '네이처 머신 인텔리전스(Nature Machine Intelligence)'에 실린 논문(논문 제목:Learning to adapt through bio-inspired gait strategies for versatile quadruped locomotion)을 통해 “이 프레임워크는 로봇이 불규칙한 지형을 스스로 극복할 수 있도록 한다”고 말했다. 이어 “생물학에서 영감을 받은 보행 전략은 에너지 절약, 실시간 조정, 보행 기억 등을 기반으로 하며, 새로운 환경에서도 최적화된 움직임을 구현할 수 있다”고 덧붙였다.
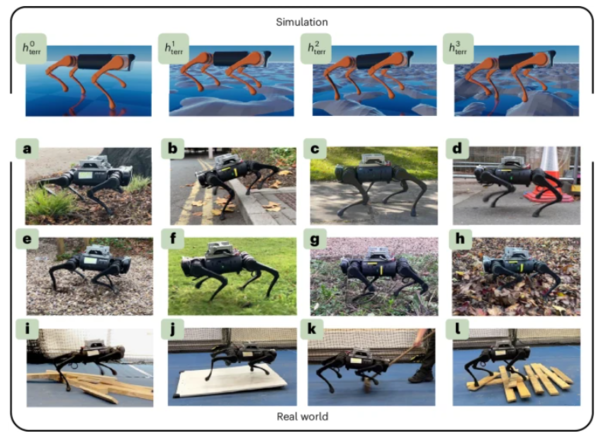
▲ 다양한 지형에서 시뮬레이션과 실제 세계 테스트를 하고 있다.
연구팀은 모든 훈련을 시뮬레이션 환경에서 수행한 후, 실제 로봇에 적용해 실험했다. 클레런스는 목재, 자갈, 뿌리, 풀 등 이전에 경험하지 못한 지형에서도 성공적으로 이동했고, 브러시로 다리를 때리는 등의 방해 동작에도 빠르게 회복하며 적응력을 입증했다.
이번 연구는 기존 심층 강화학습 AI가 특정 과제에 최적화된 반면, 환경 변화에는 취약하다는 한계를 극복한 사례다. 연구팀은 보행 전환 전략, 보행 기억, 적응형 동작 조정 등 동물 보행의 핵심 요소 3가지를 동시에 통합한 세계 최초의 프레임워크라고 강조했다.
연구팀은 “동물이 본능적으로 움직이듯, 로봇도 실시간 상황에 따라 스스로 움직일 수 있도록 전략적 지능을 부여하는 것이 목표였다”며 “이는 프로그래밍된 동작이 아닌, 실제 조건에 따른 자율 보행을 가능케 하며 인간과 동물처럼 유연하고 회복력 있는 로봇 시스템으로 발전시킬 수 있는 기반이 된다”고 설명했다.
이번 연구는 영국왕립학회(Royal Society)와 고등연구발명청(ARIA)의 지원을 받아 진행됐다. 연구팀은 향후 장거리 도약, 등반, 급경사 지형 이동 등 보다 동적인 움직임을 프레임워크에 추가할 계획이다. 현재는 개 크기의 4족 로봇에서 테스트되었지만, 동일한 형태를 갖춘 다양한 크기·무게의 로봇에도 적용 가능하다는 점에서 산업 전반에 폭넓은 활용이 기대된다.
저작권자 © 로봇신문 무단전재 및 재배포 금지