英 브리스톨대, 문어 신경 모방한 소프트 로봇 팔 개발
▲ 문어에서 영감을 얻은 소프트 로봇 팔(사진=브리스톨대)
영국 브리스톨대 연구팀이 문어의 복잡한 신경망에서 영감을 얻어 주변 환경 변화에 적응하면서 물체를 움직이고, 파지할 수 있는 혁신적인 소프트 로봇 팔을 개발했다고 밝혔다. 마치 문어가 수많은 빨판과 다리를 활용해 움직이고 물체를 잡는 것처럼, 이 로봇은 유체(공기나 물)의 흐름을 이용하여 흡착력과 움직임을 정밀하게 조정 및 제어한다.
브리스톨대 과학공학부 연구진은 간단하면서도 지능적인 이 로봇의 설계 과정을 과학 전문 학술지 ‘사이언스 로보틱스’에 발표했다. (논문 제목: Embodying soft robots with octopus-inspired hierarchical suction intelligence)
이번 연구는 소프트 로봇이 단순히 흡입 기능을 이용하여 물체에 달라붙는 것을 넘어, 주변 환경을 스스로 감지하고 그에 맞춰 동작을 조절할 수 있다는 것을 보여준다. 특히, 이 로봇은 단일 흡입 시스템만으로도 섬세한 물체를 부드럽게 잡는 것은 물론, 현재 접촉하고 있는 대상이 공기인지, 물인지, 거친 표면인지 등을 정확하게 식별할 수 있다. 심지어 물체가 얼마나 강한 힘으로 당겨지는지까지 예측할 수 있다. 이 모든 과정은 복잡한 중앙 컴퓨터 없이 자체적으로 이루어진다.
논문의 주 저자인 티엔치 위에(Tianqi Yue)는 “작년에 우리는 부드러운 소재와 물 밀봉(water sealing) 방식을 활용하여 문어가 바위에 달라붙는 방식을 모방한 인공 흡입 컵(하단 두번째 동영상 참고)을 개발했는데, 이번 연구는 여기서 더 나아가, 단순한 흡입 컵을 넘어 문어의 신경근육 구조의 핵심적인 부분을 모방한 ‘체화 흡착 지능(embodied suction intelligence)’을 소프트 로봇 시스템에 구현했다”고 말했다.

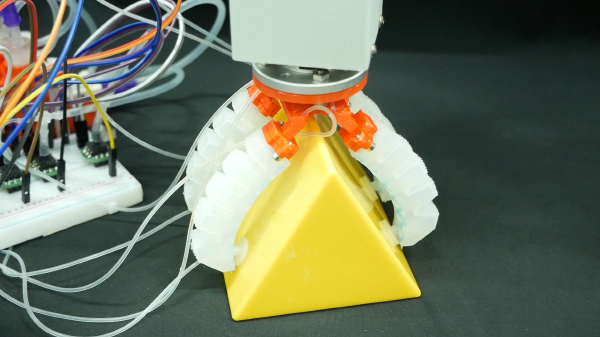
▲소프트 로봇팔로 원추형의 물체를 잡는 모습(사진=브리스톨대)
연구팀은 이 ‘체화 흡착 지능’이 두 가지 수준에서 작동한다고 설명했다. 첫째, 흡입 흐름과 로봇 내의 유체 회로를 연결함으로써 섬세한 물체를 부드럽게 잡거나, 예측 불가능한 형태의 물체를 감싸는 등 문어와 유사한 '낮은 수준 지능적인 움직임'을 가능하게 한다는 것이다. 둘째, 흡입 컵의 압력 변화를 분석하여 접촉 여부 감지, 환경 및 표면의 거칠기 분류, 외부 힘의 예측과 같은 '높은 수준의 인식 능력'을 제공한다고 한다.
연구팀은 이처럼 간단하고 비용 효율적인 흡입 지능이 더욱 안전하고 스마트하며 에너지 효율적인 차세대 소프트 로봇 개발의 토대가 될 수 있다고 주장했다. 이 기술은 농업 분야에서 과일을 섬세하게 수확하거나, 공장에서 깨지기 쉬운 물건을 안전하게 다루는 데 활용될 수 있다. 또한, 인체 내부에서 의료 도구를 안정적으로 고정하거나, 사람과 안전하게 상호작용할 수 있는 부드러운 장난감이나 웨어러블 기기를 만드는 데도 기여할 수 있을 것으로 기대된다.
현재 연구팀은 이 시스템의 크기를 더욱 줄이고 내구성을 강화하여 실제 환경에서의 활용도를 높이는 작업을 진행 중이다. 더 나아가, 스마트 소재 및 인공지능 기술과의 융합을 통해 복잡한 환경에서의 적응력과 의사 결정 능력을 향상시키는 것을 목표로 하고 있다.
티엔치 위에는 “내부에 복잡한 전자 장치 없이 단순한 흡입 컵 하나로 문어처럼 느끼고, 생각하고, 행동할 수 있다는 점이 매우 흥미롭다. 이 기술은 미래의 로봇을 더욱 자연스럽고 부드러우며 사용하는데 직관적인 것으로 만들어 줄 것이다”라고 덧붙였다.
장길수 ksjang@irobotnews.com
<저작권자 © 로봇신문사 무단전재 및 재배포금지>