MIT, '낙상'으로부터 우주비행사 보호하는 로봇 팔 '슈퍼 림스' 개발

▲ 로봇 팔을 장착한 우주복 이미지(사진=MIT)
반세기전 달 탐험에 나섰던 아폴로 우주선의 우주비행사들은 달 착륙후 지표면을 걷는 데 어려움을 겪었다. 우주비행사들은 달 표면에서 어색하게 점프 동작을 하거나, 가끔은 비틀거리면서 넘어졌다. 한번 넘어지면 겨우 일어나야 했다. 우주비행사들이 달에서 움직이는 데 어려움을 겪는 것은 달의 중력이 지구의 6분의 1 밖에 되지않기 때문이다.
MIT뉴스에 따르면 MIT 공학자들은 미래의 우주비행사들이 달에서 편안하고 안전하게 이동할 수 있도록 도와주는 로봇 팔 시스템인 ‘슈퍼림스’(SuperLimbs)를 개발했다.
연구 성과는 일본 요코하마에서 열린 ‘ICRA 2024’에서 발표됐다.
이 로봇 팔은 우주복의 배낭 부분에 부착할 수 있다. 우주비행사가 달 표면에서 안정적으로 이동하고, 도중에 넘어지더라도 빠르게 일어날 수 있도록 도와준다. 작업 수행시 또 다른 팔처럼 활용할 수도 있다.
MIT 연구팀은 우주비행사들이 착용하고 있는 부피가 큰 우주복과 달의 낮은 중력이 낙상 위험을 증가시킨다는 점을 깨달았다. 이는 약한 중력 조건에서도 관성은 그대로 유지되기 때문에 발생한다.
▲ MIT 연구팀
해리 아사다 MIT 교수는 “중력이 지구의 6분의 1에 불과한 달에서 우주복을 착용하는 것은 상당히 부담스럽고, 우주비행사들의 동작을 제한할수 있다. 우리는 우주비행사들이 넘어질 때 다시 일어설 수 있는 안전한 방법을 제공하고 싶다”고 말했다.
이를 위해 연구팀은 우주복 배낭에 통합할 수 있는 여분의 로봇 팔(Supernumerary Robotic Limbs)인 ‘슈퍼림스’를 개발했다. 이 로봇팔은 달의 중력 환경에서 ‘차량 외 활동’(EVA·Extra-Vehicular Activity)시 우주비행사들의 능력을 증강시켜준다.
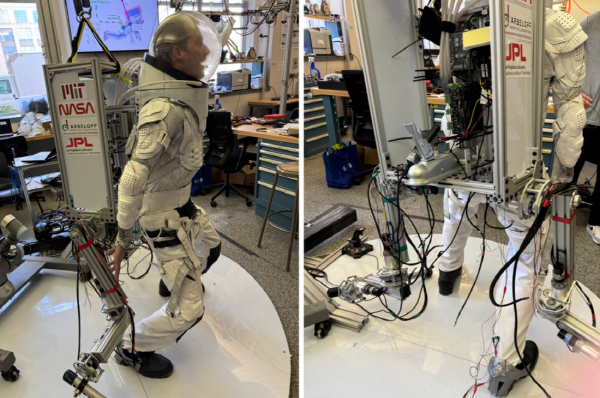
슈퍼림스는 배낭에서 뻗어나가도록 설계되었다. 배낭 안에는 우주비행사의 생명 유지 장치와 함께 로봇 팔에 동력을 공급하는 모터, 그리고 컨트롤러가 들어있다. 연구팀은 슈퍼림스 시제품을 제작해 우주복을 모방한 의류를 착용한 자원자 그룹을 대상으로 테스트했다.
연구팀은 슈퍼림스가 우주비행사들이 낙상으로보다 빠르게 일어나는 것을 돕는 것에 국한되지 않기를 바라고 있다. 예를 들어 계단을 오르는 동작을 촉진함으로써, 우주 비행사들이 다른 중요한 일들을 위해 에너지를 절약할 수 있도록 하겠다는 것이다.
장길수 ksjang@irobotnews.com
<저작권자 © 로봇신문사 무단전재 및 재배포금지>