
▲미르는 자사의 새로운 MC600이 신뢰할 수 있는 모바일 조작을 위해 설계됐다고 말했다. (사진=미르)
인간형 로봇이 산업분야 적용을 위한 첫 발을 내디딘 가운데 미국테스트및재료학회(American Society for Testing and Materials·ASTM)가 모바일 매니퓰레이터 테스트 표준을 개발 중이라고 더로봇리포트가 지난 30일(현지시각) 보도했다.
이에 따르면 ASTM의 F45.05 로봇자동화및자율시스템위원회는 WK92144로 지정된 표준을 개발하고 있다.
모바일 매니퓰레이터는 다축 로봇 팔이 부착된 자율이동로봇(AMR) 기반으로 널리 정의되고 있다. ANSI/RIA R15.08-1-2020 표준은 모바일 매니퓰레이터를 산업용 이동로봇(IMR)에 대한 분류 체계로 정의한다.
ASTM 표준의 목표는 이러한 로봇의 정밀성을 입증하고 매니퓰레이터와 모바일 베이스 움직임의 정확성을 측정하기 위한 일련의 정량적 테스트를 제공하는 것이다. 새로운 테스트 표준에 대한 연구는 미국립표준기술원(NIST) 논문을 기반으로 한다.
◆표준화 노력은 정의·테스트에 집중
오마르 아불-에네인 NIST 논문 공동 저자이자 F45 위원회 위원은 “우리는 2014년인가 2015년에 이 표준화 노력을 시작했다. 많은 경우 비연속적인 성능이 있다. 예를 들어 팔과 차량은 머신텐딩이나 조립 작업시 동시에 움직이지 않는다. 우리는 개별 자세 제한 작업에 대한 용어가 필요했다”고 말했다.
아불-에네인 위원은 2022년 ASTM 인터내셔널은 표준 범위를 확대해 로봇과 자동화를 포함시켰다고 말했다. 그는 “NIST는 무인운반로봇(AGV) 같은 여러 로봇으로 비연속 성능을 테스트한 다음 항공기 날개, 선수(船首) 아랫 부분, 풍력 터빈 블레이드와 같은 대규모 제조를 위한 연속 시스템을 실험했다”고 밝혔다.
ASTM은 R15.08을 통해 모바일 조작, 그립 유형 엔드 이펙터 및 로봇 조립을 위한 작업 그룹과 함께 AMR 테스트에 집중했다. 모바일 조작 그룹에는 30명 이상의 구성원이 있다.
ASTM은 작업물 속성에 대한 기초 테스트를 지원함으로써 업계가 로봇 구성에 대한 일관된 문서를 작성하도록 돕기를 원한다.
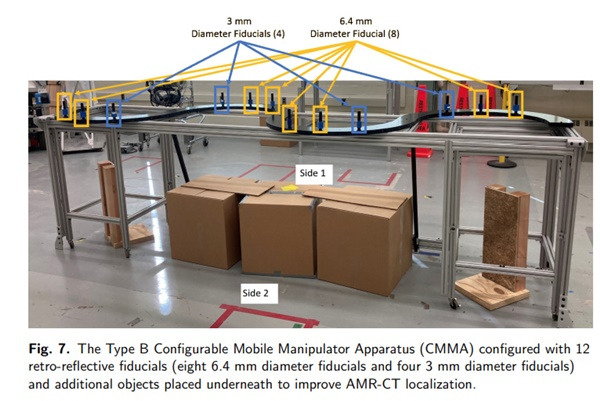
아불-에메인은 저렴한 부품을 사용하고 재현하기 쉬우며 현장 테스트가 가능토록 설계된 모바일 조작을 위한 구성 가능한 테스트 장치를 설명했다.
그러나 새로운 표준은 엔드 이펙터, 탑재물 또는 로봇군(群) 동작에는 적용되지 않는다. 아불-에메인은 이들이 로봇과 그 동작에 대한 시뮬레이션을 개발하는 데 사용될 수 있을 것이라고 인정했다.
그는 “이는 확실히 잠재력이 있긴 하지만 실험실 바닥의 움푹 들어간 곳이나 팔을 한쪽으로 완전히 뻗었을 때의 무게와 같이 현실 세계에서 항상 도사리고 있는 요인들이 있다. 우리는 모바일 매니퓰레이터를 평가하고 그 행동을 측정하는 항목을 연구해 왔으며 모두 위원회의 합의에 기반했다. 이러한 표준들은 살아있는 문서다”라고 말했다.
◆ ASTM에서 모바일 매니퓰레이터용 테스트 테이블 소개
아론 프래서 ASTM 인터내셔널의 로봇 및 자율 시스템 프로그램 책임자는 WK92144 표준과 그 방향에 대한 자세한 내용을 다음과 같이 밝혔다.
이 조직의 F45 위원회는 팔과 베이스 움직임을 연결하는 모바일 매니퓰레이터의 정밀성을 보여주는 도구인 새로운 테스트 테이블을 소개하고 있다. 로봇은 팔이 표면에서 작업을 수행하는 동안 테이블 주위에서 기동해야 한다. 이러한 작업에는 용접이나 접착을 위한 S자형의 검은 영역을 추적하고 쐐기를 박는 것이 포함된다. 검은 영역(black area)은 과열된 용접부위, 또는 접착제를 정확히 칠할 수 있도록 미리 코팅된 지점을 말한다.
운영자들은 테이블탑을 90도로 세우거나, 45도로 기울이거나, 0도로 평평하게 놓을 수 있다. 테스트를 더 어렵게 만들려면 움직임과 진동을 추가하는 셰이커를 부착할 수 있다.
프래서는 “테이블 디자인은 표준화될 것이고, 위원회는 모든 사람이 테이블을 만드는 방법에 대한 지침을 제공할 것이다. 테이블을 기반으로 여러 테스트 표준이 계획됐다. 목표는 NIST 작업 보드와 이 새로운 테이블을 정확도와 반복성을 위한 새로운 파지(把持·grasping)/조작/조립 애플리케이션 테스트 방법의 토대가 되게 하는 것이다”라고 설명했다.
그는 “또한 우리의 보드와 테이블을 사용하는 새로운 학생 경진대회도 기대하라. 이는 학생들이 표준 사용 방법에 참여하고 이 새로운 테스트 도구 활용법에 대한 지식을 갖고 커뮤니티로 내용들을 보내는 데 도움을 주게 될 것이다. 우리는 새로운 로봇 시스템들이 이 표준들을 통과할 수 있도록 하기 위해 계속해서 이를 내놓을 것이다”라고 밝혔다.
프래서는 “우리의 희망은 휴머노이드와 모바일 매니퓰레이터가 결과를 보여줌으로써 최종 사용자가 기능을 더 잘 이해하고 자신의 애플리케이션에 적합한 시스템을 갖도록 확인시켜 주는 것이다”라고 말했다.
이성원 robot3@irobotnews.com
<저작권자 © 로봇신문사 무단전재 및 재배포금지>
'정책' 카테고리의 다른 글
| 中 충칭, 임바디드 인텔리전스 로봇 산업 정책 지원 강화 (0) | 2024.12.10 |
|---|---|
| 中 안후이성, '휴머노이드 로봇 산업 발전 행동 계획' 발표 (2) | 2024.12.09 |
| 산업부, 제3차 전략기획투자협의회 개최 ...2026년 R&D 큰 틀 확정 (0) | 2024.12.05 |
| 中 난징시, "2026년까지 중국 최고 로봇 도시 될 것" (0) | 2024.11.27 |
| [기획] ‘로봇산업 국내외 인증동향’ (2) | 2024.11.26 |